|
| class | AbstractContext3 |
| | An abstract superclass for the Context3 objects for dynamical systems, encapsulating functionality that is independent of the numerical scalar type in use. More...
|
| |
| class | AbstractSystem3 |
| | An abstract superclass for dynamical systems, encapsulating functionality that is independent of the numerical scalar type in use. More...
|
| |
| class | AbstractSystemInterface |
| | A fully type-erased abstract superclass for dynamical systems. More...
|
| |
| class | AbstractValue |
| | A fully type-erased container class. More...
|
| |
| class | Adder |
| | An adder for arbitrarily many inputs of equal length. More...
|
| |
| class | Adder3 |
| | An adder for arbitrarily many vector-valued inputs of equal length. More...
|
| |
| class | BasicStateVector |
| | BasicStateVector is a concrete class template that implements StateVector in a convenient manner for leaf Systems, by owning and wrapping a VectorInterface<T>. More...
|
| |
| class | BasicVector |
| | BasicVector is a semantics-free wrapper around an Eigen vector that satisfies VectorInterface. More...
|
| |
| class | Cache |
| |
| class | CacheEntry |
| | Each cache entry contains: More...
|
| |
| class | Cascade3 |
| | A Cascade is a concrete SystemDiagram containing exactly two compatible subsystems with the output of the first serving as input to the second. More...
|
| |
| class | Context |
| | The Context is a container for all of the data necessary to uniquely determine the computations performed by a System. More...
|
| |
| class | Context3 |
| | The context is a container for all data necessary to uniquely determine the results of computations performed by a System. More...
|
| |
| class | ContinuousState |
| | The ContinuousState is a container for all the State variables that are unique to continuous Systems, i.e. More...
|
| |
| class | ContinuousSystem |
| | An abstract base class template for Systems that have continuous dynamics. More...
|
| |
| class | ContinuousSystemInterface |
| | A template interface for Systems that have continuous dynamics. More...
|
| |
| class | DependentInputPort |
| | The DependentInputPort wraps a pointer to the OutputPort of a System for use as an input to another System. More...
|
| |
| class | Diagram3 |
| | A Diagram is a concrete System that contains other System objects as subsystems and wires them together, but adds no new content. More...
|
| |
| class | DynamicConstraint |
| | Provides a base implementation and interface for a dynamic constraint (which is intended to be used with trajectory optimization, but is not specific to that purpose). More...
|
| |
| class | FreestandingInputPort |
| | The FreestandingInputPort encapsulates a vector of data for use as an input to a System. More...
|
| |
| class | Gain3 |
| | Multiply the single vector input by a scalar and present the result as the single output port. More...
|
| |
| struct | InputEntryFinder |
| | There is one of these corresponding to every InputPort3 in the System3 that created the containing Context3. More...
|
| |
| class | InputPort |
| | The InputPort describes a single input to a System, from another System or from an external driver. More...
|
| |
| class | InputPort3 |
| | An InputPort3 represents an external data input to a System. More...
|
| |
| struct | InputPortFinder |
| | A system diagram may inherit an input port from one of its contained subsystems, which will know that port by a different port number than we will use here. More...
|
| |
| class | LeafStateVector |
| | LeafStateVector is an abstract class template that implements StateVector for leaf Systems, i.e. More...
|
| |
| struct | OutputEntryFinder |
| | There is one of these corresponding to every OutputPort3 in the System3 that created the containing Context3. More...
|
| |
| class | OutputPort |
| | An OutputPort represents a data output from a System. More...
|
| |
| class | OutputPort3 |
| | An OutputPort3 represents a data output from a System. More...
|
| |
| struct | OutputPortFinder |
| | See InputPortFinder for information. More...
|
| |
| class | OutputPortListenerInterface |
| | OutputPortListenerInterface is an interface that consumers of an output port must satisfy to receive notifications when the value on that output port changes. More...
|
| |
| struct | State |
| | The State is a container for all the data comprising the complete state of a particular System at a particular moment. More...
|
| |
| class | StateSubvector |
| | StateSubvector is a concrete class template that implements StateVector by providing a sliced view of a StateVector. More...
|
| |
| class | StateVector |
| | StateVector is an abstract base class template for vector quantities within the state of a System. More...
|
| |
| struct | StepInfo |
| | Contains information about the independent variable including time and step number. More...
|
| |
| class | System3 |
| | A superclass template for systems that use a specified scalar type T for numerical values. More...
|
| |
| class | SystemDynamicConstraint |
| | Implements a dynamic constraint which uses the dynamics function of a system. More...
|
| |
| class | SystemInterface |
| | A superclass template for systems that receive input, maintain state, and produce numerical output using a specified scalar type T. More...
|
| |
| class | SystemOutput |
| | A container for all the output ports of a System. More...
|
| |
| class | Value |
| | A container class for an arbitrary type T. More...
|
| |
| class | ValueListenerInterface |
| | ValueListenerInterface is an interface that dependent computations must implement so that they can receive notifications when a prerequisite value is modified. More...
|
| |
| class | ValueListenerList |
| | A ValueListenerList object maintains a list of value listeners that have registered to receive notification of value changes from the holder of that list. More...
|
| |
| class | VectorConstant3 |
| | This System produces a constant VectorInterface value on its single OutputPort. More...
|
| |
| class | VectorInputPort3 |
| | A VectorInputPort3 extends InputPort3 with the restriction that only VectorOutputPort3 connections are acceptable, and the value will be of type VectorInterface. More...
|
| |
| class | VectorInterface |
| | VectorInterface is a pure abstract interface that real-valued signals between Systems must satisfy. More...
|
| |
| class | VectorObject |
| | This concrete class provides object semantics to an abstract VectorInterface by implementing a copy constructor and copy assignment using the VectorInterface's Clone() method. More...
|
| |
| class | VectorOutputPort |
| | The OutputPort represents a data output from a System. More...
|
| |
| class | VectorOutputPort3 |
| | Extends OutputPort3 for cases where the OutputPort3 is known to be vector-valued, with scalar elements of template type T. More...
|
| |
|
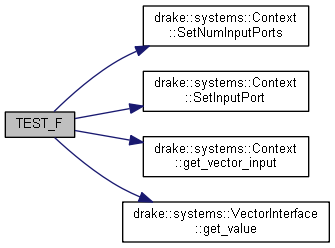
| | TEST_F (ContextTest, GetNumInputPorts) |
| |
| | TEST_F (ContextTest, ClearInputPorts) |
| |
| | TEST_F (ContextTest, SetOutOfBoundsInputPort) |
| |
| | TEST_F (ContextTest, GetVectorInput) |
| |
| | TEST_F (ContextTest, Clone) |
| |
| | TEST_F (FreestandingInputPortTest, Access) |
| |
| | TEST_F (FreestandingInputPortTest, Mutation) |
| |
| | TEST_F (FreestandingInputPortTest, ContinouousPort) |
| |
| | TEST_F (DependentInputPortTest, Access) |
| |
| | TEST_F (DependentInputPortTest, Mutation) |
| |
| | TEST_F (VectorOutputPortTest, Access) |
| |
| | TEST_F (VectorOutputPortTest, Mutation) |
| |
| | TEST_F (VectorOutputPortTest, Listeners) |
| |
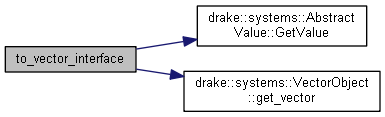
| template<typename T > |
| const VectorInterface< T > & | to_vector_interface (const AbstractValue &value) |
| | Strip off the VectorObject so we can see the VectorInterface. More...
|
| |
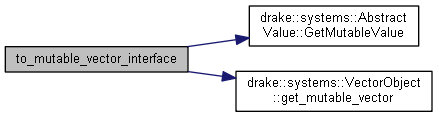
| template<typename T > |
| VectorInterface< T > * | to_mutable_vector_interface (AbstractValue *value) |
| | Strip off the VectorObject so we can see the VectorInterface. More...
|
| |
 1.8.11
1.8.11 
