|
Drake
|
|
Drake
|
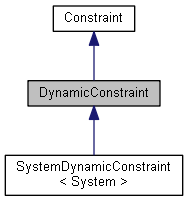
Provides a base implementation and interface for a dynamic constraint (which is intended to be used with trajectory optimization, but is not specific to that purpose). More...
#include <drake/systems/plants/constraint/dynamic_constraint.h>
Public Member Functions | |
| DynamicConstraint (int num_states, int num_inputs) | |
The format of the input to the eval() function is defined by num_states and num_inputs. More... | |
| virtual | ~DynamicConstraint () |
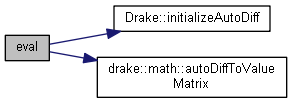
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const override |
| void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const override |
 Public Member Functions inherited from Constraint Public Member Functions inherited from Constraint | |
| Constraint (size_t num_constraints) | |
| template<typename DerivedLB , typename DerivedUB > | |
| Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) | |
| virtual | ~Constraint () |
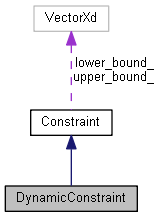
| Eigen::VectorXd const & | lower_bound () const |
| Eigen::VectorXd const & | upper_bound () const |
| size_t | num_constraints () const |
Protected Member Functions | |
| virtual void | dynamics (const Drake::TaylorVecXd &state, const Drake::TaylorVecXd &input, Drake::TaylorVecXd *xdot) const =0 |
Additional Inherited Members | |
| Protected Attributes inherited from Constraint | |
| Eigen::VectorXd | lower_bound_ |
| Eigen::VectorXd | upper_bound_ |
Provides a base implementation and interface for a dynamic constraint (which is intended to be used with trajectory optimization, but is not specific to that purpose).
This implementation deliberately knows nothing about the underlying system representation.
Each evaluation of the constraint considers a pair of state vectors + input vectors along with an accompanying timestep.
| DynamicConstraint | ( | int | num_states, |
| int | num_inputs | ||
| ) |
The format of the input to the eval() function is defined by num_states and num_inputs.
The length of the vector will be (1 + num_states * 2 + num_inputs * 2), with the format:
(length) 1: timestep num_states: state 0 num_states: state 1 num_inputs: input 0 num_inputs: input 1
|
virtual |
|
protectedpure virtual |

|
overridevirtual |
|
overridevirtual |
 1.8.11
1.8.11