|
Drake
|
|
Drake
|
VectorInterface is a pure abstract interface that real-valued signals between Systems must satisfy. More...
#include <drake/systems/framework/vector_interface.h>
Public Member Functions | |
| virtual | ~VectorInterface () |
| virtual int | size () const =0 |
| Returns the size of the vector, which must be equal to the number of rows in get_value(). More... | |
| virtual void | set_value (const Eigen::Ref< const VectorX< T >> &value)=0 |
| Sets the vector to the given value. More... | |
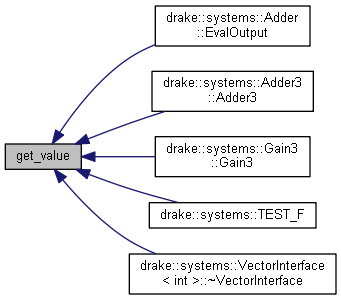
| virtual Eigen::VectorBlock< const VectorX< T > > | get_value () const =0 |
| Returns a column vector containing the entire value of the signal. More... | |
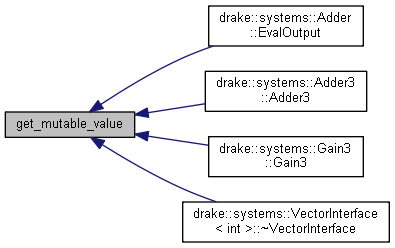
| virtual Eigen::VectorBlock< VectorX< T > > | get_mutable_value ()=0 |
| Returns a reference that allows mutation of the values in this vector, but does not allow resizing the vector itself. More... | |
| virtual std::unique_ptr< VectorInterface< T > > | Clone () const =0 |
| Copies the entire vector to a new VectorInterface, with the same concrete implementation type. More... | |
Protected Member Functions | |
| VectorInterface () | |
VectorInterface is a pure abstract interface that real-valued signals between Systems must satisfy.
Classes that inherit from VectorInterface may provide names for the elements of the vector, and may also provide other computations for the convenience of Systems handling the signal. The vector is always a column vector with elements stored in contiguous memory locations.
| T | Must be a Scalar compatible with Eigen. |
|
inlinevirtual |
|
inlineprotected |
|
pure virtual |
Copies the entire vector to a new VectorInterface, with the same concrete implementation type.
Implemented in BasicVector< T >.

|
pure virtual |
Returns a reference that allows mutation of the values in this vector, but does not allow resizing the vector itself.
Implemented in BasicVector< T >.
|
pure virtual |
Returns a column vector containing the entire value of the signal.
Implemented in BasicVector< T >.
|
pure virtual |
Sets the vector to the given value.
After a.set_value(b.get_value()), a must be identical to b. May throw std::out_of_range if the new value has different dimensions than expected by the concrete class implementing VectorInterface.
Implemented in BasicVector< T >.

|
pure virtual |
Returns the size of the vector, which must be equal to the number of rows in get_value().
Implemented in BasicVector< T >.

 1.8.11
1.8.11 
