|
| | VectorConstant3 (const std::string &name, std::unique_ptr< VectorInterface< T >> value) |
| | Takes over ownership of the given VectorInterface, which will be regurgitated as the value of the OutputPort. More...
|
| |
| | VectorConstant3 (const std::string &name, const Eigen::Ref< const VectorX< T >> &vector) |
| | Given an Eigen vector value, create a BasicVector containing that value as the output of this system. More...
|
| |
| | VectorConstant3 (const std::string &name, const T &scalar_value) |
| | Given a scalar, create a one-element BasicVector containing that value as the output of this system. More...
|
| |
| std::unique_ptr< Context3< T > > | CreateDefaultContext () const |
| | Get a default Context<T> compatible with this System<T>. More...
|
| |
| const VectorInterface< T > & | EvalVectorOutputPort (const Context3< T > &context, int port_num) const |
| | Convenience method for obtaining the up-to-date value for an output port which is known to be vector valued. More...
|
| |
| const T & | EvalPotentialEnergy (const Context3< T > &context) const |
| | Returns the potential energy currently stored in the configuration provided in the given Context3. More...
|
| |
| const T & | EvalKineticEnergy (const Context3< T > &context) const |
| | Return the kinetic energy currently present in the motion provided in the given Context3. More...
|
| |
| void | UpdateDiscreteVariables (Context3< T > &context, int sample_key) const |
| | TODO: update discrete variables. More...
|
| |
| std::pair< double, int > | GetNextSampleTime (const Context3< T > &context) const |
| | Returns the next sample time required by any subsystem of this System. More...
|
| |
| Eigen::VectorBlock< const VectorX< T > > | EvalTimeDerivatives (const Context3< T > &context, DerivativeBlock block) const |
| | Returns time derivatives of one or all of the continuous state variable groups. More...
|
| |
| const T & | EvalConservativePower (const Context3< T > &context) const |
| | For continuous, physical systems only, returns the rate at which energy is being converted from potential energy to kinetic energy by this system in the given Context3. More...
|
| |
| const T & | EvalNonConservativePower (const Context3< T > &context) const |
| | For continuous, physical systems only, returns the rate at which energy is being added to (positive) or dissipated from (negative) this sytem other than* by conversion between potential and kinetic energy (in the given Context3). More...
|
| |
| void | MapVelocityToConfigurationDerivatives (const Context3< T > &context, const Eigen::Ref< const VectorX< T >> &generalized_velocity, Eigen::Ref< VectorX< T >> *configuration_derivatives) const |
| | Transforms a given generalized velocity v into qdot, the time derivative of the generalized configuration q. More...
|
| |
| void | MapAccelerationToConfigurationSecondDerivatives (const Context3< T > &context, const Eigen::Ref< const VectorX< T >> &generalized_acceleration, Eigen::Ref< VectorX< T >> *configuration_second_derivatives) const |
| | Transforms a given generalized acceleration vdot into qdotdot, the second time derivative of the generalized configuration q. More...
|
| |
| virtual | ~AbstractSystem3 () |
| |
| std::string | get_name () const |
| | Returns the name of this system. More...
|
| |
| DRAKESYSTEMFRAMEWORK_EXPORT std::unique_ptr< AbstractContext3 > | CreateDefaultContext () const |
| | Returns a default context, initialized with run time mutable memory for the correct number and type of InputPort3, OutputPort3, and state variable objects, as well as time, parameters, and basic computations. More...
|
| |
| DRAKESYSTEMFRAMEWORK_EXPORT const AbstractValue & | EvalOutputPort (const AbstractContext3 &context, int port_num) const |
| | Obtain an up-to-date value for one of this system's output ports. More...
|
| |
| const InputPortFinder & | get_input_port_finder (int port_num) const |
| |
| const OutputPortFinder & | get_output_port_finder (int port_num) const |
| |
| CacheEntry::Calculator | get_output_port_calculator (int port_num) const |
| | Given an output port number, return a function that knows how to calculate the value of that port when given a system and context. More...
|
| |
| void | CalcOutputPort (const AbstractContext3 &context, int port_num, AbstractValue *result) const |
| | Unconditionally calculate what would be the output port value into an already-allocated appropriate result object. More...
|
| |
| int | AddInputPort (std::unique_ptr< InputPort3 > port) |
| | Add an input port that is to be owned by this system. More...
|
| |
| int | AddOutputPort (std::unique_ptr< OutputPort3 > port) |
| | Add an output port that is to be owned by this System. More...
|
| |
| int | get_num_input_ports () const |
| | Returns the current number of input ports in this system. More...
|
| |
| const InputPort3 & | get_input_port (int port_num) const |
| | Returns a const reference to the InputPort3 with the given port number. More...
|
| |
| InputPort3 * | get_mutable_input_port (int port_num) |
| | Returns a mutable pointer to the InputPort3 with the given port number. More...
|
| |
| int | get_num_output_ports () const |
| | Returns the current number of output ports in this system. More...
|
| |
| const OutputPort3 & | get_output_port (int port_num) const |
| | Returns a const reference to the OutputPort3 with the given port number. More...
|
| |
| OutputPort3 * | get_mutable_output_port (int port_num) |
| | Returns a mutable pointer to the OutputPort3 with the given port number. More...
|
| |
| template<class ConcreteSystem > |
| ConcreteSystem * | AddSubsystem (std::unique_ptr< ConcreteSystem > subsystem) |
| | Takes ownership of the given system and returns an unowned, raw pointer to the concrete type for convenient access. More...
|
| |
| int | InheritInputPort (AbstractSystem3 *child_subsystem, int input_port_num) |
| | The given subsystem's InputPort3 becomes the next InputPort3 of this system diagram. More...
|
| |
| int | InheritOutputPort (AbstractSystem3 *child_subsystem, int output_port_num) |
| | The given subsystem's OutputPort3 becomes the next OutputPort3 of this system diagram. More...
|
| |
| void | Connect (AbstractSystem3 *source_subsystem, int output_port_num, AbstractSystem3 *sink_subsystem, int input_port_num) |
| | Connect the given output port of subsystem 1 into the given input port of subsystem 2. More...
|
| |
| int | get_num_subsystems () const |
| | Returns the current number of subsystems contained in this system diagram. More...
|
| |
| const AbstractSystem3 & | get_subsystem (int index) const |
| | Returns a const reference to one of the contained subsystems, using the index reflecting the order in which it was added. More...
|
| |
| AbstractSystem3 * | get_mutable_subsystem (int index) |
| | Returns a mutable pointer to one of the contained subsystems, using the index reflecting the order in which it was added. More...
|
| |
| const AbstractSystem3 * | get_parent_system () const |
| | Returns a const pointer to the parent system that owns this one, or nullptr if this is a root system. More...
|
| |
| AbstractSystem3 * | get_mutable_parent_system () |
| | Returns a mutable pointer to the parent system that owns this one, or nullptr if this is a root system. More...
|
| |
| int | get_subsystem_num () const |
| | If this system is a subsystem of a parent system, return the subsystem number by which that parent knows us. More...
|
| |
| std::string | GetSubsystemPathName () const |
| | Determine the full path name of this subsystem in a form like /rootname/parentname/myname. More...
|
| |
| const AbstractContext3 & | find_my_subcontext (const AbstractContext3 &some_subcontext) const |
| | Get const access to this subsystem's subcontext given const access to any other subsystem's subcontext in the same context diagram. More...
|
| |
| AbstractContext3 * | find_my_mutable_subcontext (AbstractContext3 *some_subcontext) const |
| | Get mutable access to this subsystem's subcontext given mutable access to any other subsystem's subcontext in the same context diagram. More...
|
| |
| const AbstractSystem3 & | get_root_system () const |
| | Find the root system of the tree of which this subsystem is a member. More...
|
| |
| AbstractSystem3 * | get_mutable_root_system () |
| | Get a mutable pointer to the root system of the tree of which this subsystem is a member. More...
|
| |
|
| enum | DerivativeBlock { kQdot = 0,
kVdot = 1,
kZdot = 2,
kQdotDot = 3
} |
| |
| | System3 (const std::string &name) |
| | Creates a System3 with no ports. More...
|
| |
| const VectorInterface< T > & | EvalVectorInputPort (const Context3< T > &context, int port_num) const |
| | Convenience method for obtaining the up-to-date value for an input port which is known to be vector valued. More...
|
| |
| virtual const T & | DoEvalPotentialEnergy (const Context3< T > &context) const |
| | If your system is capable of storing energy, implement this method to return the potential energy currently stored in the configuration provided in the given Context3. More...
|
| |
| virtual const T & | DoEvalKineticEnergy (const Context3< T > &context) const |
| | If your system models energy of motion, implement this method to return the kinetic energy currently present in the motion provided in the given Context3. More...
|
| |
| void | DoMapVelocityToConfigurationDerivatives (const Context3< T > &context, const Eigen::Ref< const VectorX< T >> &generalized_velocity, Eigen::Ref< VectorX< T >> *configuration_derivatives) const |
| | If your system has configuration and velocity variables, and the mapping from velocity v to configuration derivatives q is not identity, then you must implement this method. More...
|
| |
| void | DoMapAccelerationToConfigurationSecondDerivatives (const Context3< T > &context, const Eigen::Ref< const VectorX< T >> &generalized_acceleration, Eigen::Ref< VectorX< T >> *configuration_second_derivatives) const |
| | See above for when you have to implement this method. More...
|
| |
| virtual const T & | DoEvalConservativePower (const Context3< T > &context) const |
| | Return the rate at which mechanical energy is being converted from potential energy to kinetic energy by this system in the given Context3. More...
|
| |
| virtual const T & | DoEvalNonConservativePower (const Context3< T > &context) const |
| | Return the rate at which mechanical energy is being generated (positive) or dissipated (negative) other than by conversion between potential and kinetic energy (in the given Context3). More...
|
| |
| | AbstractSystem3 (const std::string &name) |
| |
| DRAKESYSTEMFRAMEWORK_EXPORT const AbstractValue & | EvalInputPort (const AbstractContext3 &context, int port_num) const |
| | Obtain an up-to-date value for one of this system's input ports. More...
|
| |
| virtual void | DoAcquireContextResources (AbstractContext3 *context) const |
| | Acquire any private Context resources your concrete System needs, and assign them default values. More...
|
| |
template<typename T>
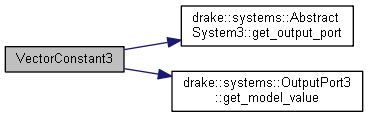
class drake::systems::VectorConstant3< T >
This System produces a constant VectorInterface value on its single OutputPort.
- Template Parameters
-
| T | The type of numerical values processed here. Must be a valid Eigen scalar. |
 Public Member Functions inherited from System3< T >
Public Member Functions inherited from System3< T >
 1.8.11
1.8.11 
