|
| template<typename Scalar > |
| using | Vector1 = Eigen::Matrix< Scalar, 1, 1 > |
| | A column vector of size 1 (a scalar), templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Vector2 = Eigen::Matrix< Scalar, 2, 1 > |
| | A column vector of size 2, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Vector3 = Eigen::Matrix< Scalar, 3, 1 > |
| | A column vector of size 3, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Vector4 = Eigen::Matrix< Scalar, 4, 1 > |
| | A column vector of size 4, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Vector6 = Eigen::Matrix< Scalar, 6, 1 > |
| | A column vector of size 6. More...
|
| |
| template<typename Scalar > |
| using | VectorX = Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > |
| | A column vector of any size, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Matrix3 = Eigen::Matrix< Scalar, 3, 3 > |
| | A matrix of 3 rows and 3 columns, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Matrix6 = Eigen::Matrix< Scalar, 6, 6 > |
| | A matrix of 3 rows and 3 columns, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Matrix3X = Eigen::Matrix< Scalar, 3, Eigen::Dynamic > |
| | A matrix of 3 rows, dynamic columns, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | Matrix4X = Eigen::Matrix< Scalar, 4, Eigen::Dynamic > |
| | A matrix of 4 rows, dynamic columns, templated on scalar type. More...
|
| |
| template<typename Scalar > |
| using | MatrixX = Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > |
| | A matrix of dynamic size, templated on scalar type. More...
|
| |
| using | VectorUpTo73d = Eigen::Matrix< double, Eigen::Dynamic, 1, 0, 73, 1 > |
| | A column vector of dynamic size, up to a maximum of 73 elements. More...
|
| |
| using | AutoDiffUpTo73d = Eigen::AutoDiffScalar< VectorUpTo73d > |
| | An autodiff variable with a dynamic number of partials, up to 73 maximum. More...
|
| |
| using | AutoDiffXd = Eigen::AutoDiffScalar< Eigen::VectorXd > |
| | An autodiff variable with a dynamic number of partials. More...
|
| |
| template<typename Scalar > |
| using | TwistVector = Eigen::Matrix< Scalar, kTwistSize, 1 > |
| | A column vector consisting of one twist. More...
|
| |
| template<typename Scalar > |
| using | TwistMatrix = Eigen::Matrix< Scalar, kTwistSize, Eigen::Dynamic > |
| | A matrix with one twist per column, and dynamically many columns. More...
|
| |
| template<typename Scalar > |
| using | SquareTwistMatrix = Eigen::Matrix< Scalar, kTwistSize, kTwistSize > |
| | A six-by-six matrix. More...
|
| |
|
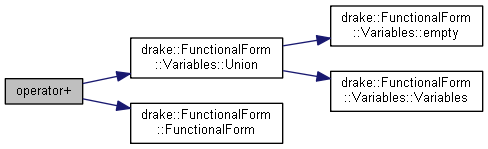
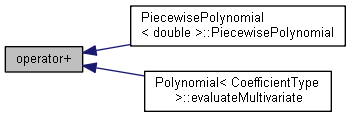
| FunctionalForm | operator+ (FunctionalForm const &l, FunctionalForm const &r) |
| |
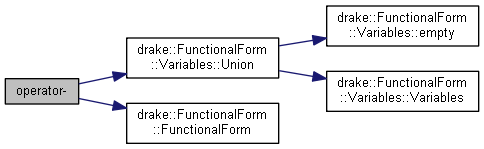
| FunctionalForm | operator- (FunctionalForm const &l, FunctionalForm const &r) |
| |
| FunctionalForm | operator* (FunctionalForm const &l, FunctionalForm const &r) |
| |
| FunctionalForm | operator/ (FunctionalForm const &l, FunctionalForm const &r) |
| |
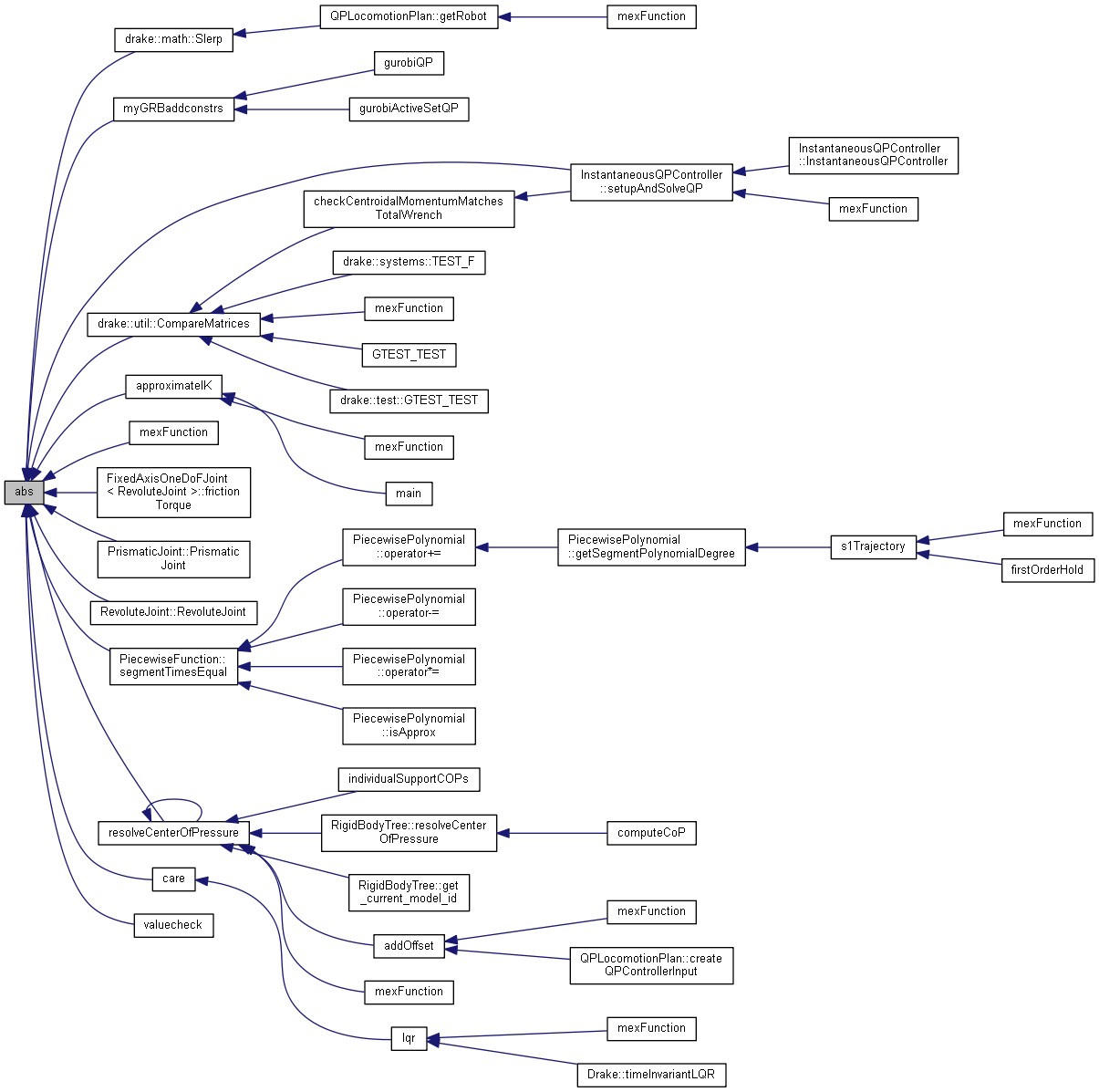
| FunctionalForm | abs (FunctionalForm const &x) |
| |
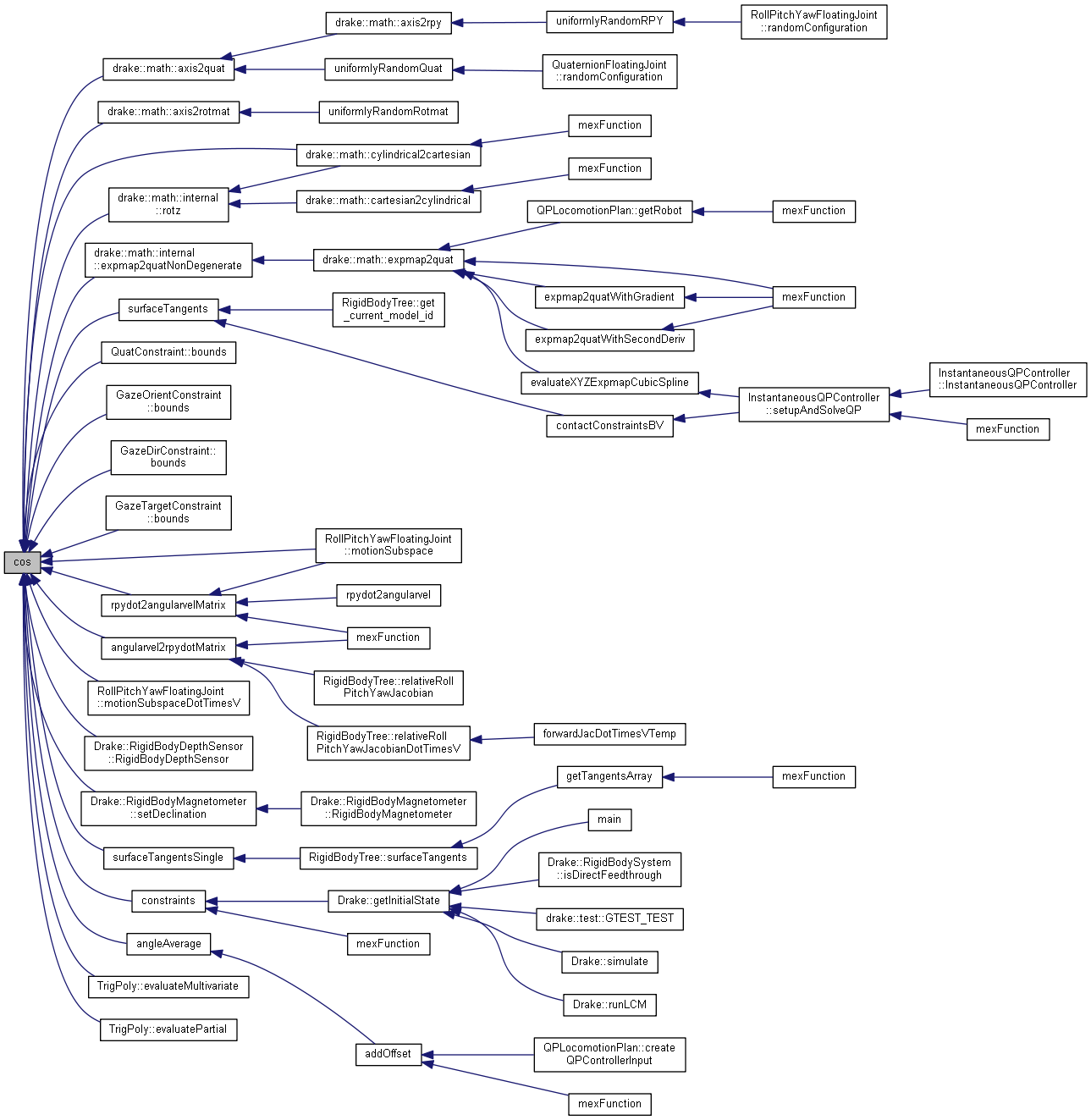
| FunctionalForm | cos (FunctionalForm const &x) |
| |
| FunctionalForm | exp (FunctionalForm const &x) |
| |
| FunctionalForm | log (FunctionalForm const &x) |
| |
| FunctionalForm | sin (FunctionalForm const &x) |
| |
| FunctionalForm | sqrt (FunctionalForm const &x) |
| |
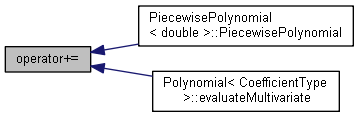
| FunctionalForm & | operator+= (FunctionalForm &l, FunctionalForm const &r) |
| |
| FunctionalForm & | operator-= (FunctionalForm &l, FunctionalForm const &r) |
| |
| FunctionalForm & | operator*= (FunctionalForm &l, FunctionalForm const &r) |
| |
| FunctionalForm & | operator/= (FunctionalForm &l, FunctionalForm const &r) |
| |
| FunctionalForm & | operator+= (FunctionalForm &l, double r) |
| |
| FunctionalForm & | operator-= (FunctionalForm &l, double r) |
| |
| FunctionalForm & | operator*= (FunctionalForm &l, double r) |
| |
| FunctionalForm & | operator/= (FunctionalForm &l, double r) |
| |
| FunctionalForm | operator+ (FunctionalForm const &l, double r) |
| |
| FunctionalForm | operator+ (double l, FunctionalForm const &r) |
| |
| FunctionalForm | operator- (FunctionalForm const &l, double r) |
| |
| FunctionalForm | operator- (double l, FunctionalForm const &r) |
| |
| FunctionalForm | operator* (FunctionalForm const &l, double r) |
| |
| FunctionalForm | operator* (double l, FunctionalForm const &r) |
| |
| FunctionalForm | operator/ (FunctionalForm const &l, double r) |
| |
| FunctionalForm | operator/ (double l, FunctionalForm const &r) |
| |
| std::ostream & | operator<< (std::ostream &os, FunctionalForm const &f) |
| |
| std::ostream & | operator<< (std::ostream &os, FunctionalForm::Variable const &v) |
| |
| bool | operator== (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator!= (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator< (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator<= (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator> (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator>= (FunctionalForm::Variable const &l, FunctionalForm::Variable const &r) |
| |
| bool | operator== (FunctionalForm::Variables const &lhs, FunctionalForm::Variables const &rhs) |
| |
| bool | operator!= (FunctionalForm::Variables const &lhs, FunctionalForm::Variables const &rhs) |
| |










 1.8.11
1.8.11 
