|
Drake
|
|
Drake
|
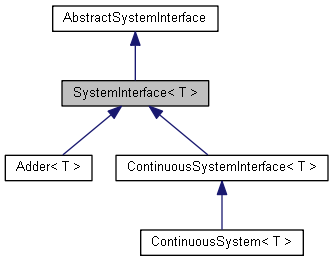
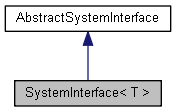
A superclass template for systems that receive input, maintain state, and produce numerical output using a specified scalar type T. More...
#include <drake/systems/framework/system_interface.h>
Public Member Functions | |
| virtual std::unique_ptr< Context< T > > | CreateDefaultContext () const =0 |
| Returns a default context, initialized with the correct numbers of concrete input ports and state variables for this System. More... | |
| virtual std::unique_ptr< SystemOutput< T > > | AllocateOutput () const =0 |
| Returns a default output, initialized with the correct number of concrete output ports for this System. More... | |
| virtual void | EvalOutput (const Context< T > &context, SystemOutput< T > *output) const =0 |
| Computes the output for the given context, possibly updating values in the cache. More... | |
| virtual T | EvalPotentialEnergy (const Context< T > &context) const |
| Return the potential energy currently stored in the configuration provided in the given Context. More... | |
| virtual T | EvalKineticEnergy (const Context< T > &context) const |
| Return the kinetic energy currently present in the motion provided in the given Context. More... | |
 Public Member Functions inherited from AbstractSystemInterface Public Member Functions inherited from AbstractSystemInterface | |
| virtual | ~AbstractSystemInterface () |
| virtual std::string | get_name () const =0 |
| Returns the name of this System. More... | |
Protected Member Functions | |
| SystemInterface () | |
| Protected Member Functions inherited from AbstractSystemInterface | |
| AbstractSystemInterface () | |
A superclass template for systems that receive input, maintain state, and produce numerical output using a specified scalar type T.
Concrete systems with no state should inherit directly from this interface. Concrete systems with state should use a more specific interface in the SystemInterface family.
| T | The vector element type, which must be a valid Eigen scalar. |
|
inlineprotected |
|
pure virtual |
Returns a default output, initialized with the correct number of concrete output ports for this System.
Implemented in Adder< T >.
|
pure virtual |
Returns a default context, initialized with the correct numbers of concrete input ports and state variables for this System.
Since input port pointers are not owned by the Context, they should simply be initialized to nullptr.
Implemented in Adder< T >.
|
inlinevirtual |
Return the kinetic energy currently present in the motion provided in the given Context.
Non-physical Systems will return 0.
|
pure virtual |
Computes the output for the given context, possibly updating values in the cache.
Implemented in Adder< T >.
|
inlinevirtual |
Return the potential energy currently stored in the configuration provided in the given Context.
Non-physical Systems will return 0.
 1.8.11
1.8.11 
