|
Drake
|
|
Drake
|
Implements a dynamic constraint which uses the dynamics function of a system. More...
#include <drake/systems/plants/constraint/dynamic_constraint.h>
Public Member Functions | |
| SystemDynamicConstraint (std::shared_ptr< System > system) | |
 Public Member Functions inherited from DynamicConstraint Public Member Functions inherited from DynamicConstraint | |
| DynamicConstraint (int num_states, int num_inputs) | |
The format of the input to the eval() function is defined by num_states and num_inputs. More... | |
| virtual | ~DynamicConstraint () |
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const override |
| void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const override |
| Public Member Functions inherited from Constraint | |
| Constraint (size_t num_constraints) | |
| template<typename DerivedLB , typename DerivedUB > | |
| Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) | |
| virtual | ~Constraint () |
| Eigen::VectorXd const & | lower_bound () const |
| Eigen::VectorXd const & | upper_bound () const |
| size_t | num_constraints () const |
Additional Inherited Members | |
| Protected Attributes inherited from Constraint | |
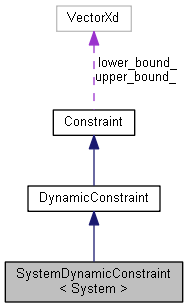
| Eigen::VectorXd | lower_bound_ |
| Eigen::VectorXd | upper_bound_ |
Implements a dynamic constraint which uses the dynamics function of a system.
|
inlineexplicit |

 1.8.11
1.8.11 
