|
Drake
|
|
Drake
|
An abstract base class template for Systems that have continuous dynamics. More...
#include <drake/systems/framework/continuous_system.h>
Public Member Functions | |
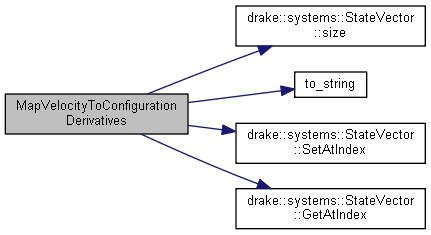
| void | MapVelocityToConfigurationDerivatives (const Context< T > &context, const StateVector< T > &generalized_velocity, StateVector< T > *configuration_derivatives) const override |
| Applies the identity mapping. More... | |
 Public Member Functions inherited from ContinuousSystemInterface< T > Public Member Functions inherited from ContinuousSystemInterface< T > | |
| virtual std::unique_ptr< ContinuousState< T > > | AllocateTimeDerivatives () const =0 |
| Returns a ContinuousState of the same size as the continuous_state allocated in CreateDefaultContext. More... | |
| virtual void | EvalTimeDerivatives (const Context< T > &context, ContinuousState< T > *derivatives) const =0 |
| Produces the derivatives of the continuous state xc with respect to time. More... | |
| virtual T | EvalConservativePower (const Context< T > &context) const |
| Return the rate at which mechanical energy is being converted from potential energy to kinetic energy by this system in the given Context. More... | |
| virtual T | EvalNonConservativePower (const Context< T > &context) const |
| Return the rate at which mechanical energy is being generated (positive) or dissipated (negative) other than by conversion between potential and kinetic energy (in the given Context). More... | |
| Public Member Functions inherited from SystemInterface< T > | |
| virtual std::unique_ptr< Context< T > > | CreateDefaultContext () const =0 |
| Returns a default context, initialized with the correct numbers of concrete input ports and state variables for this System. More... | |
| virtual std::unique_ptr< SystemOutput< T > > | AllocateOutput () const =0 |
| Returns a default output, initialized with the correct number of concrete output ports for this System. More... | |
| virtual void | EvalOutput (const Context< T > &context, SystemOutput< T > *output) const =0 |
| Computes the output for the given context, possibly updating values in the cache. More... | |
| virtual T | EvalPotentialEnergy (const Context< T > &context) const |
| Return the potential energy currently stored in the configuration provided in the given Context. More... | |
| virtual T | EvalKineticEnergy (const Context< T > &context) const |
| Return the kinetic energy currently present in the motion provided in the given Context. More... | |
| Public Member Functions inherited from AbstractSystemInterface | |
| virtual | ~AbstractSystemInterface () |
| virtual std::string | get_name () const =0 |
| Returns the name of this System. More... | |
Protected Member Functions | |
| ContinuousSystem () | |
| Protected Member Functions inherited from ContinuousSystemInterface< T > | |
| ContinuousSystemInterface () | |
| Protected Member Functions inherited from SystemInterface< T > | |
| SystemInterface () | |
| Protected Member Functions inherited from AbstractSystemInterface | |
| AbstractSystemInterface () | |
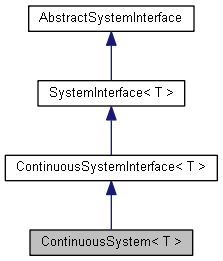
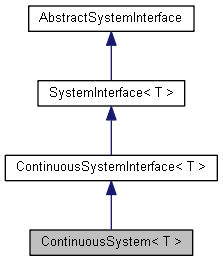
An abstract base class template for Systems that have continuous dynamics.
Defines some reasonable default implementations.
|
inlineprotected |
|
inlineoverridevirtual |
Applies the identity mapping.
Throws std::out_of_range if the generalized_velocity and configuration_derivatives are not the same size. Child classes should override this function if qdot != v.
Implements ContinuousSystemInterface< T >.
 1.8.11
1.8.11 
