|
Drake
|
|
Drake
|
#include <drake/systems/plants/RigidBodyTree.h>
Public Member Functions | |
| RigidBodyTree (const std::string &urdf_filename, const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::ROLLPITCHYAW) | |
| RigidBodyTree (void) | |
| virtual | ~RigidBodyTree (void) |
| void | addRobotFromURDFString (const std::string &xml_string, const std::string &root_dir=".", const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::ROLLPITCHYAW, std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr) |
| void | addRobotFromURDFString (const std::string &xml_string, std::map< std::string, std::string > &package_map, const std::string &root_dir=".", const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::ROLLPITCHYAW, std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr) |
| void | addRobotFromURDF (const std::string &urdf_filename, const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::ROLLPITCHYAW, std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr) |
| void | addRobotFromURDF (const std::string &urdf_filename, std::map< std::string, std::string > &package_map, const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::ROLLPITCHYAW, std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr) |
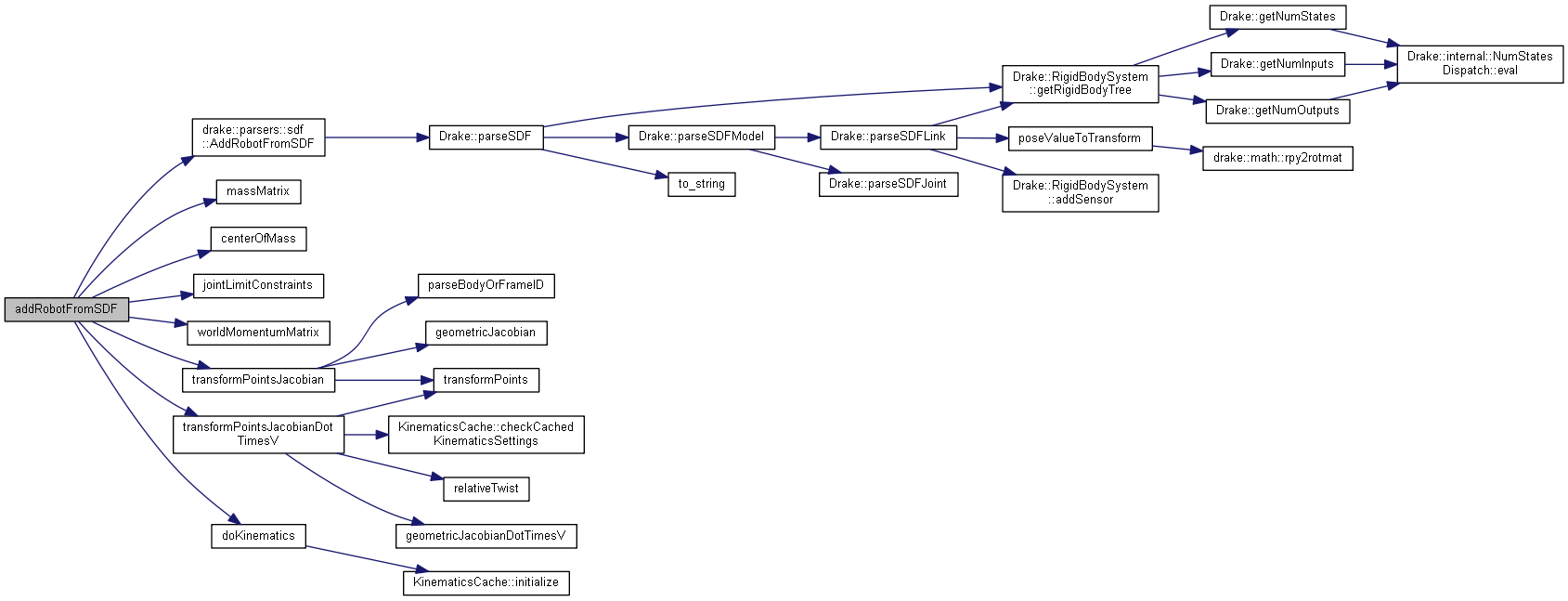
| void | addRobotFromSDF (const std::string &sdf_filename, const DrakeJoint::FloatingBaseType floating_base_type=DrakeJoint::QUATERNION, std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr) |
| int | get_next_model_id () |
| Returns an integer that can be used to uniquely identify a model within this rigid body tree. More... | |
| int | get_current_model_id () |
| Returns an integer that will be used as a unique ID for the next model to be added within the rigid body tree. More... | |
| void | addFrame (std::shared_ptr< RigidBodyFrame > frame) |
| std::map< std::string, int > | computePositionNameToIndexMap () const |
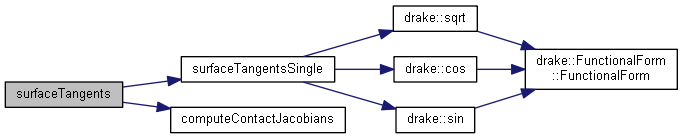
| void | surfaceTangents (Eigen::Map< Eigen::Matrix3Xd > const &normals, std::vector< Eigen::Map< Eigen::Matrix3Xd >> &tangents) const |
| bool | transformCollisionFrame (const DrakeCollision::ElementId &eid, const Eigen::Isometry3d &transform_body_to_joint) |
| void | compile (void) |
| Eigen::VectorXd | getZeroConfiguration () const |
| Eigen::VectorXd | getRandomConfiguration (std::default_random_engine &generator) const |
| std::string | getPositionName (int position_num) const |
| std::string | getVelocityName (int velocity_num) const |
| std::string | getStateName (int state_num) const |
| void | drawKinematicTree (std::string graphviz_dotfile_filename) const |
| template<typename DerivedQ > | |
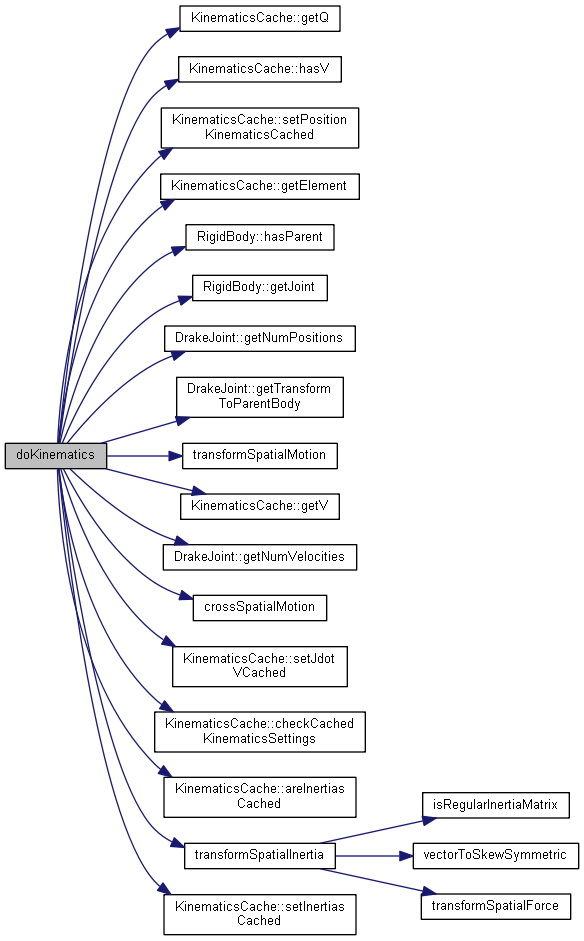
| KinematicsCache< typename DerivedQ::Scalar > | doKinematics (const Eigen::MatrixBase< DerivedQ > &q) const |
Initializes a KinematicsCache with the given configuration q, computes the kinematics, and returns the cache. More... | |
| template<typename DerivedQ , typename DerivedV > | |
| KinematicsCache< typename DerivedQ::Scalar > | doKinematics (const Eigen::MatrixBase< DerivedQ > &q, const Eigen::MatrixBase< DerivedV > &v, bool compute_JdotV=true) const |
Initializes a KinematicsCache with the given configuration q and velocity v, computes the kinematics, and returns the cache. More... | |
| template<typename Scalar > | |
| void | doKinematics (KinematicsCache< Scalar > &cache, bool compute_JdotV=false) const |
Computes the kinematics on the given cache. More... | |
| bool | isBodyPartOfRobot (const RigidBody &body, const std::set< int > &robotnum) const |
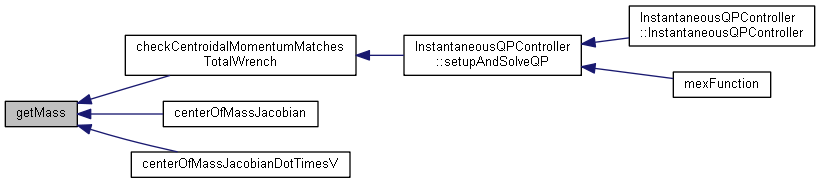
| double | getMass (const std::set< int > &robotnum=default_robot_num_set) const |
| template<typename Scalar > | |
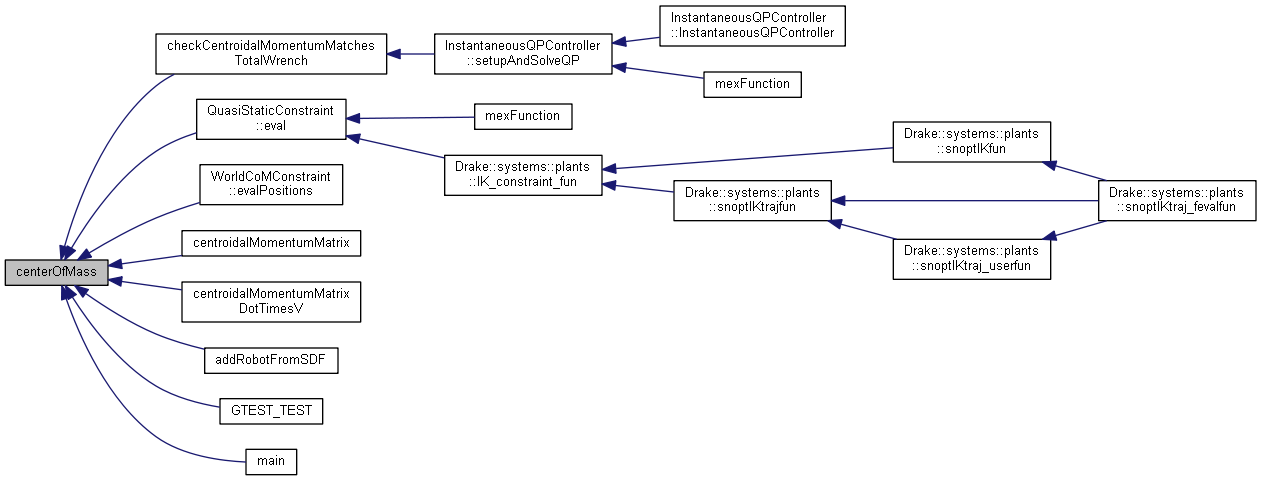
| Eigen::Matrix< Scalar, drake::kSpaceDimension, 1 > | centerOfMass (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set) const |
| template<typename Scalar > | |
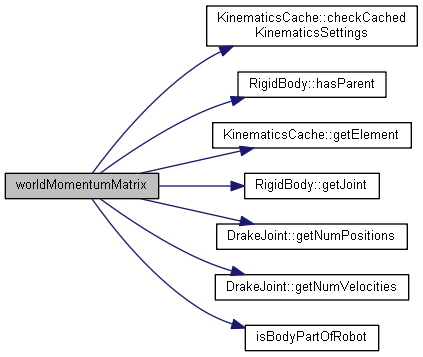
| drake::TwistMatrix< Scalar > | worldMomentumMatrix (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set, bool in_terms_of_qdot=false) const |
| template<typename Scalar > | |
| drake::TwistVector< Scalar > | worldMomentumMatrixDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set) const |
| template<typename Scalar > | |
| drake::TwistMatrix< Scalar > | centroidalMomentumMatrix (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set, bool in_terms_of_qdot=false) const |
| template<typename Scalar > | |
| drake::TwistVector< Scalar > | centroidalMomentumMatrixDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, drake::kSpaceDimension, Eigen::Dynamic > | centerOfMassJacobian (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set, bool in_terms_of_qdot=false) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, drake::kSpaceDimension, 1 > | centerOfMassJacobianDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum=default_robot_num_set) const |
| template<typename DerivedA , typename DerivedB , typename DerivedC > | |
| void | jointLimitConstraints (Eigen::MatrixBase< DerivedA > const &q, Eigen::MatrixBase< DerivedB > &phi, Eigen::MatrixBase< DerivedC > &J) const |
| size_t | getNumJointLimitConstraints () const |
| int | getNumContacts (const std::set< int > &body_idx) const |
| template<typename DerivedNormal , typename DerivedPoint > | |
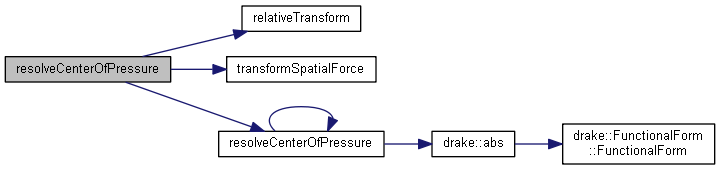
| std::pair< Eigen::Vector3d, double > | resolveCenterOfPressure (const KinematicsCache< double > &cache, const std::vector< ForceTorqueMeasurement > &force_torque_measurements, const Eigen::MatrixBase< DerivedNormal > &normal, const Eigen::MatrixBase< DerivedPoint > &point_on_contact_plane) const |
| Computes CoP in world frame. More... | |
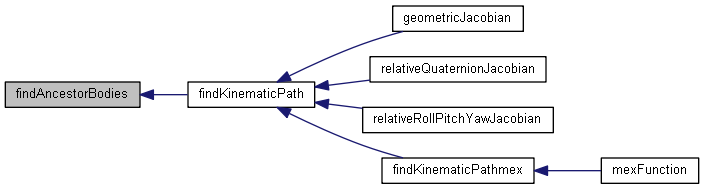
| void | findAncestorBodies (std::vector< int > &ancestor_bodies, int body) const |
| KinematicPath | findKinematicPath (int start_body_or_frame_idx, int end_body_or_frame_idx) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | massMatrix (KinematicsCache< Scalar > &cache) const |
| Compute the positive definite mass (configuration space) matrix \( *H(q) \), defined by \(T = \frac{1}{2} v^T H(q) v \), where \( T \) is kinetic energy. More... | |
| template<typename Scalar > | |
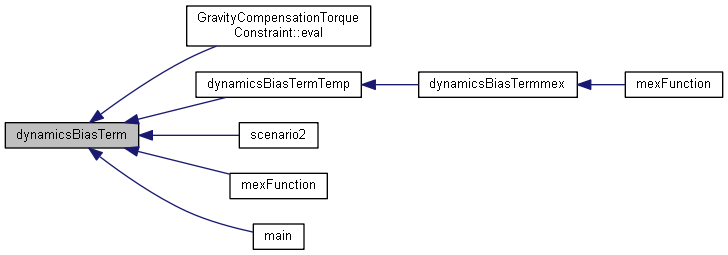
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | dynamicsBiasTerm (KinematicsCache< Scalar > &cache, const eigen_aligned_unordered_map< RigidBody const *, drake::TwistVector< Scalar >> &f_ext, bool include_velocity_terms=true) const |
| Compute the term \( C(q, v, f_\text{ext}) \) in the manipulator equations \[ H(q) \dot{v} + C(q, v, f_\text{ext}) = B(q) u \] . More... | |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | inverseDynamics (KinematicsCache< Scalar > &cache, const eigen_aligned_unordered_map< RigidBody const *, drake::TwistVector< Scalar >> &f_ext, const Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > &vd, bool include_velocity_terms=true) const |
| Compute \[ H(q) \dot{v} + C(q, v, f_\text{ext}) \] that is, the left hand side of the manipulator equations \[ H(q) \dot{v} + C(q, v, f_\text{ext}) = B(q) u \] . More... | |
| template<typename DerivedV > | |
| Eigen::Matrix< typename DerivedV::Scalar, Eigen::Dynamic, 1 > | frictionTorques (Eigen::MatrixBase< DerivedV > const &v) const |
| template<typename Scalar , typename DerivedPoints > | |
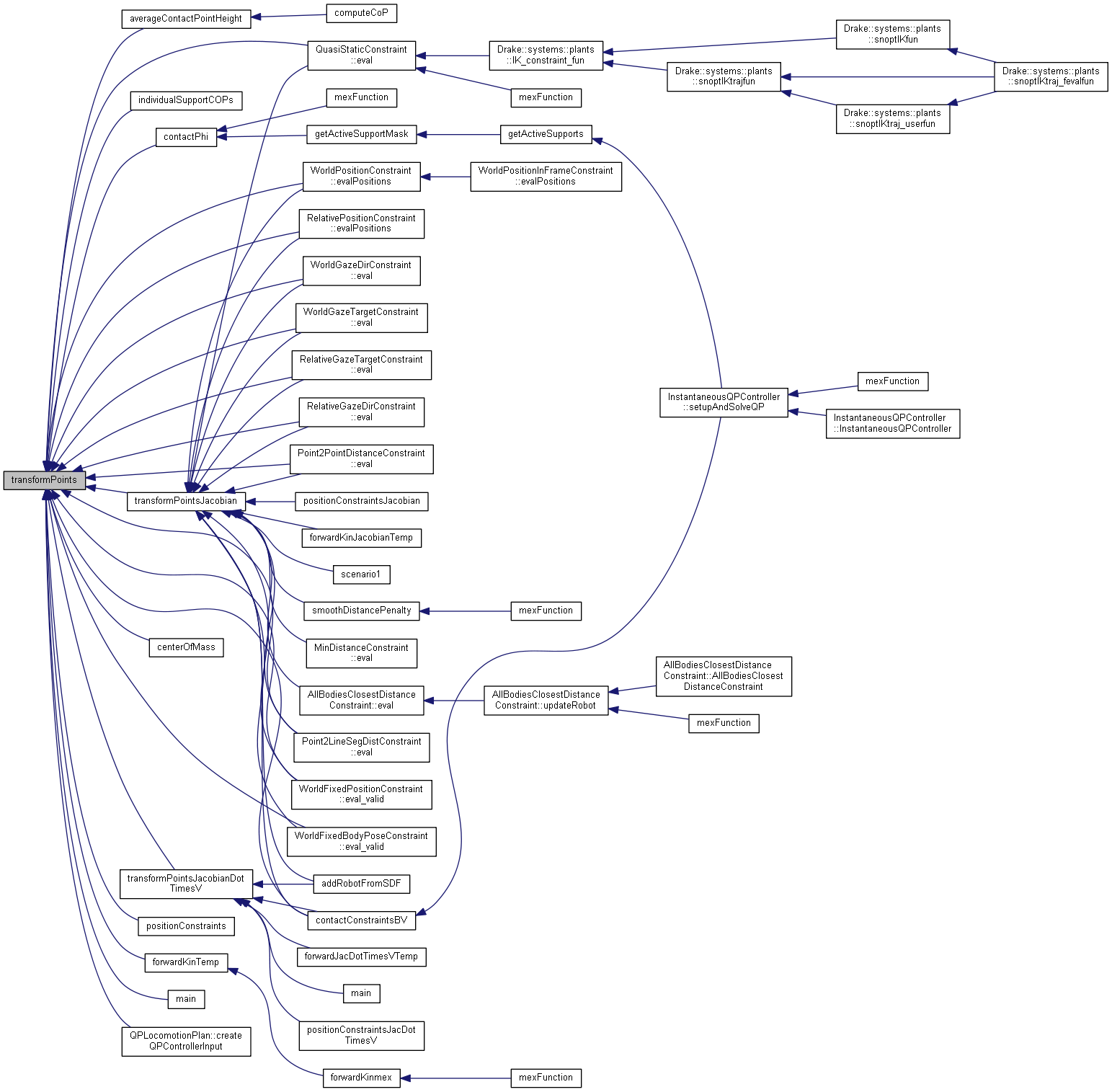
| Eigen::Matrix< Scalar, 3, DerivedPoints::ColsAtCompileTime > | transformPoints (const KinematicsCache< Scalar > &cache, const Eigen::MatrixBase< DerivedPoints > &points, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
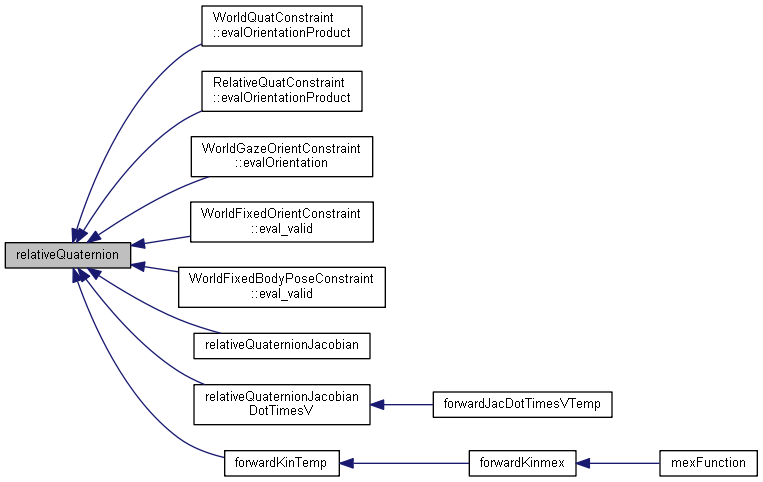
| Eigen::Matrix< Scalar, 4, 1 > | relativeQuaternion (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
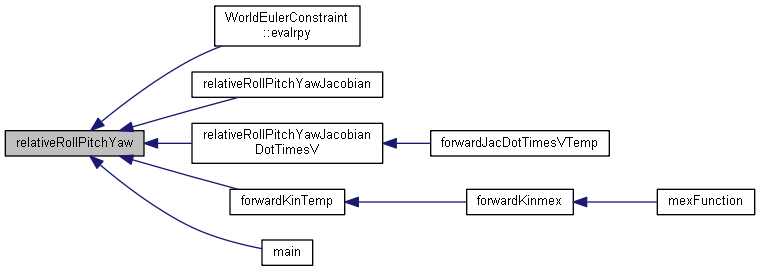
| Eigen::Matrix< Scalar, 3, 1 > | relativeRollPitchYaw (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar , typename DerivedPoints > | |
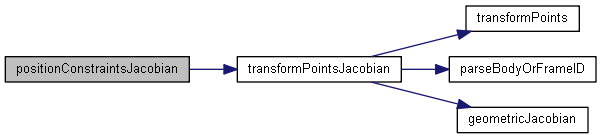
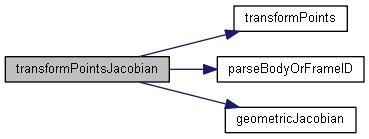
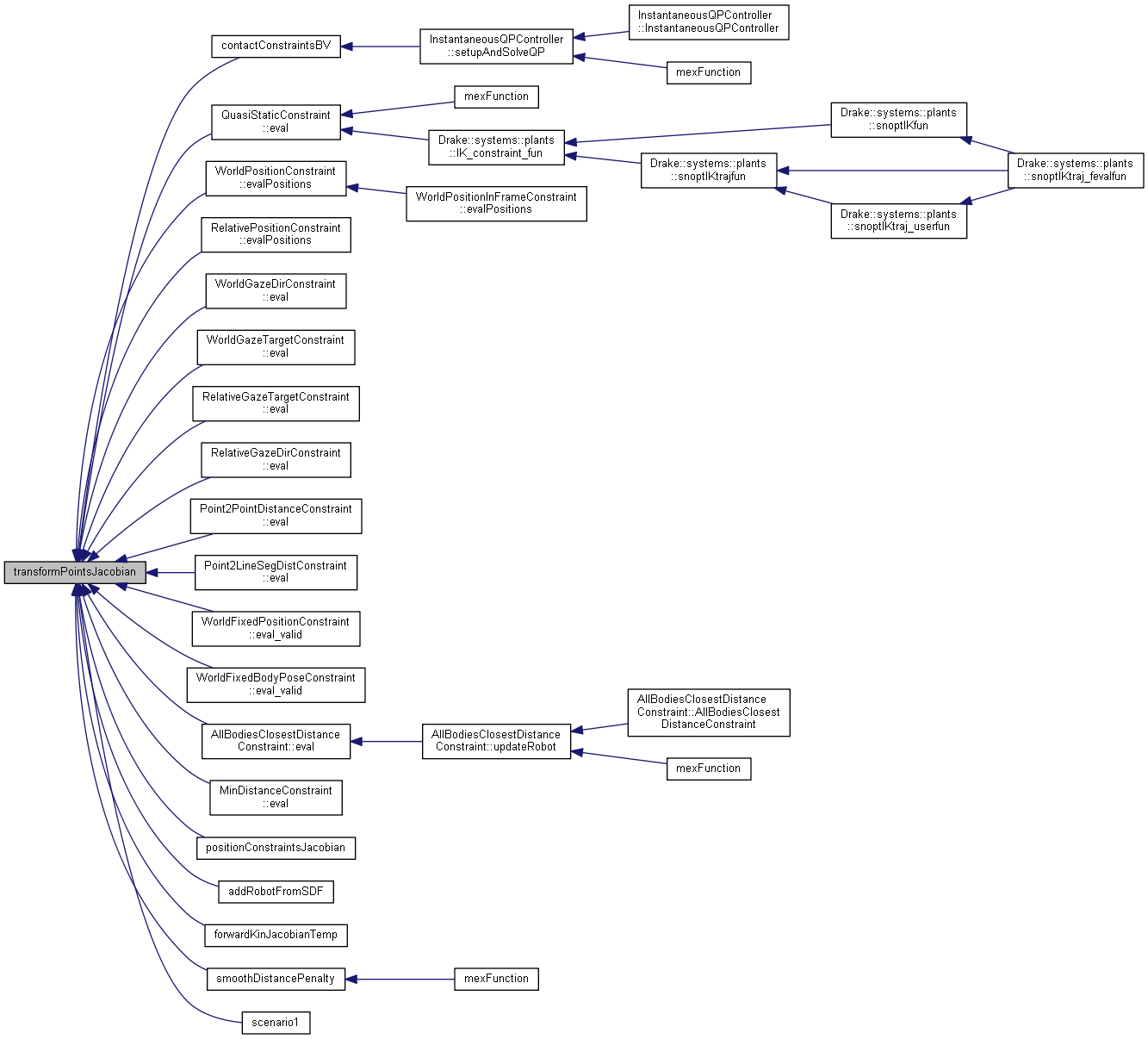
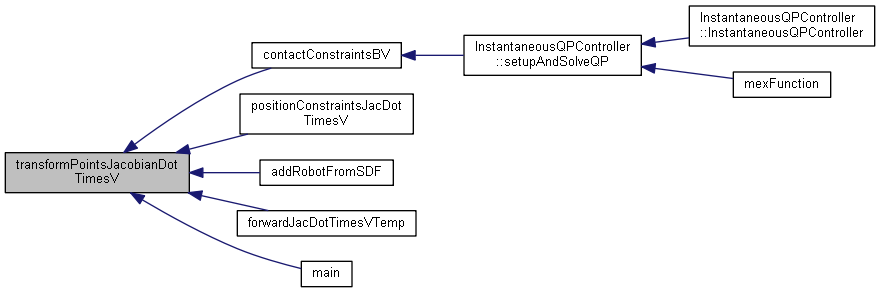
| Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | transformPointsJacobian (const KinematicsCache< Scalar > &cache, const Eigen::MatrixBase< DerivedPoints > &points, int from_body_or_frame_ind, int to_body_or_frame_ind, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
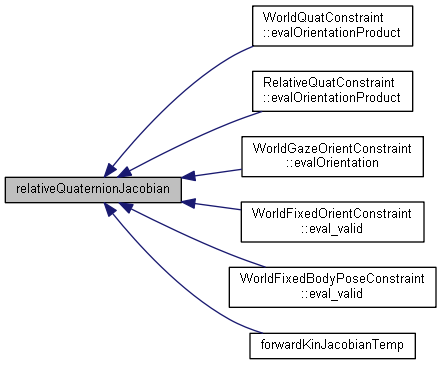
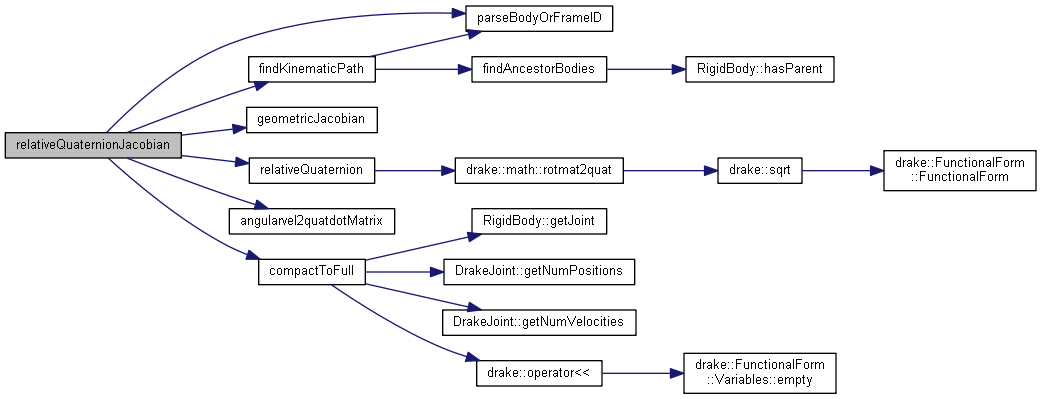
| Eigen::Matrix< Scalar, drake::kQuaternionSize, Eigen::Dynamic > | relativeQuaternionJacobian (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
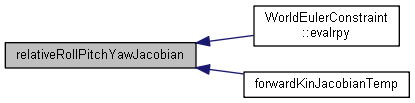
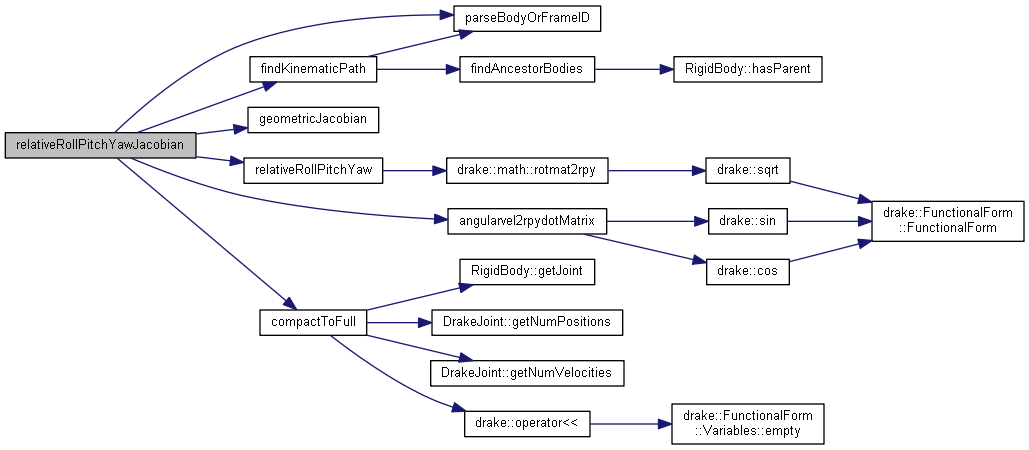
| Eigen::Matrix< Scalar, drake::kRpySize, Eigen::Dynamic > | relativeRollPitchYawJacobian (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | forwardKinPositionGradient (const KinematicsCache< Scalar > &cache, int npoints, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar , typename DerivedPoints > | |
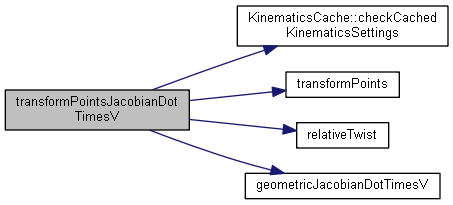
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | transformPointsJacobianDotTimesV (const KinematicsCache< Scalar > &cache, const Eigen::MatrixBase< DerivedPoints > &points, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
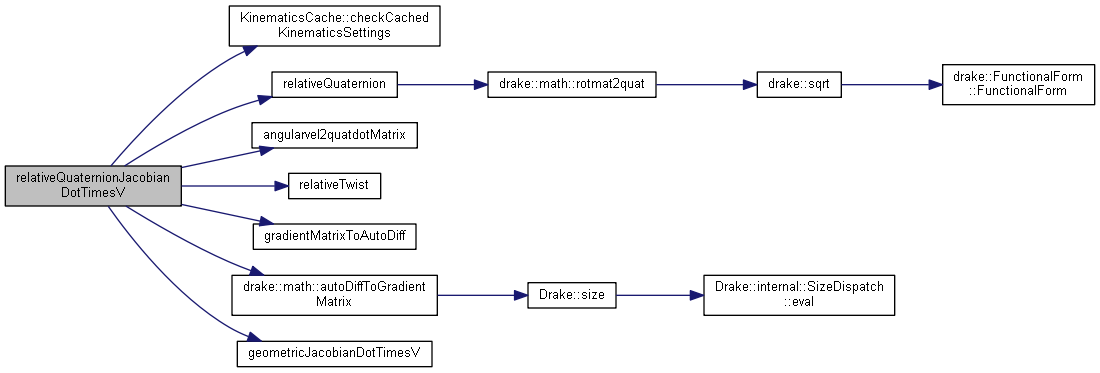
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | relativeQuaternionJacobianDotTimesV (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
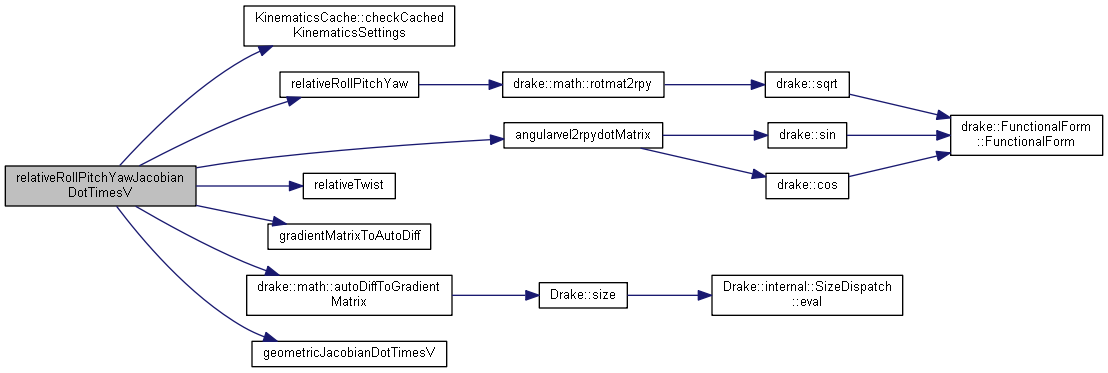
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | relativeRollPitchYawJacobianDotTimesV (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
| drake::TwistMatrix< Scalar > | geometricJacobian (const KinematicsCache< Scalar > &cache, int base_body_or_frame_ind, int end_effector_body_or_frame_ind, int expressed_in_body_or_frame_ind, bool in_terms_of_qdot=false, std::vector< int > *v_indices=nullptr) const |
| template<typename Scalar > | |
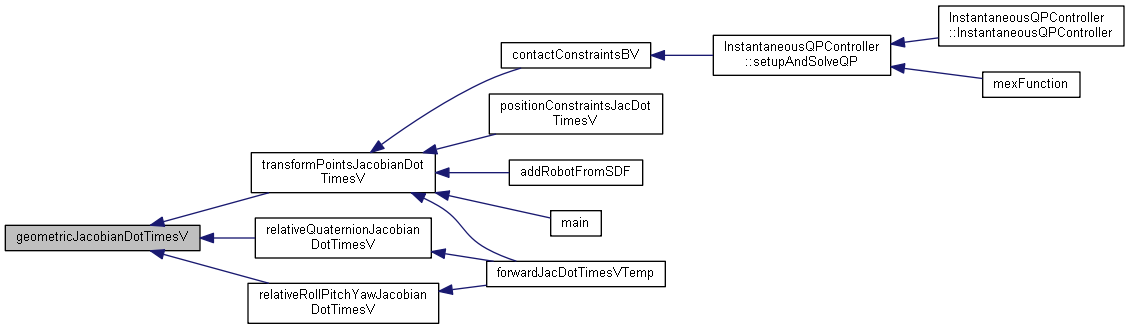
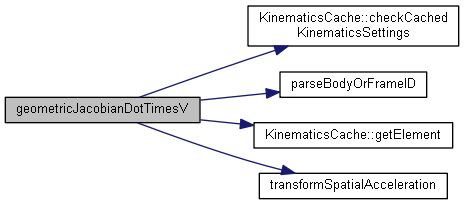
| drake::TwistVector< Scalar > | geometricJacobianDotTimesV (const KinematicsCache< Scalar > &cache, int base_body_or_frame_ind, int end_effector_body_or_frame_ind, int expressed_in_body_or_frame_ind) const |
| template<typename Scalar > | |
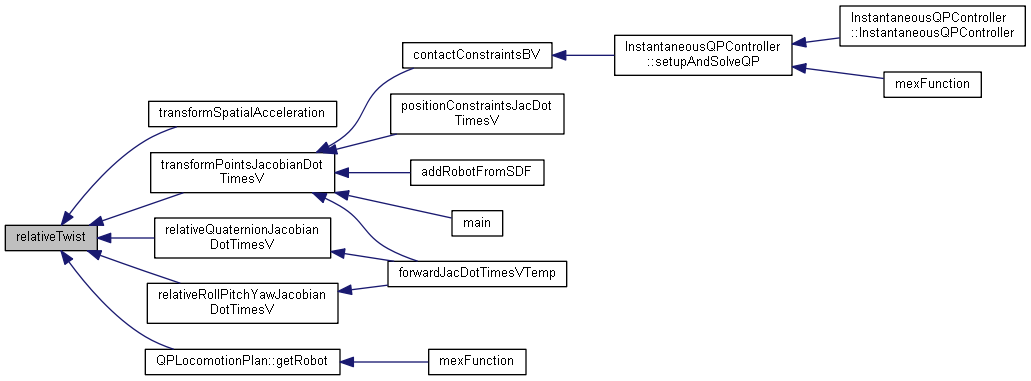
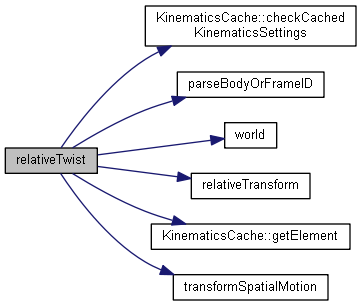
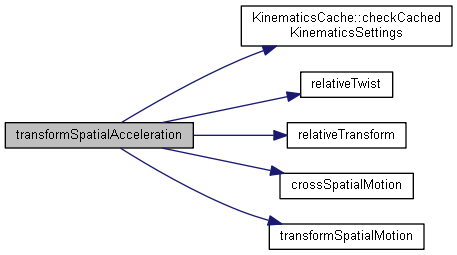
| drake::TwistVector< Scalar > | relativeTwist (const KinematicsCache< Scalar > &cache, int base_or_frame_ind, int body_or_frame_ind, int expressed_in_body_or_frame_ind) const |
| template<typename Scalar > | |
| drake::TwistVector< Scalar > | transformSpatialAcceleration (const KinematicsCache< Scalar > &cache, const drake::TwistVector< Scalar > &spatial_acceleration, int base_or_frame_ind, int body_or_frame_ind, int old_body_or_frame_ind, int new_body_or_frame_ind) const |
| template<typename Scalar > | |
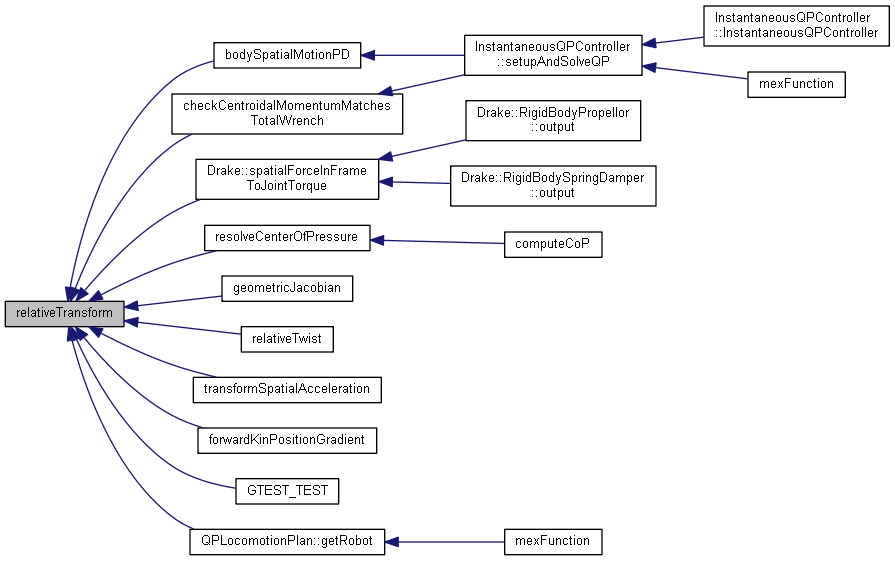
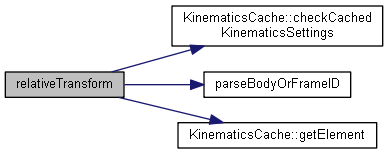
| Eigen::Transform< Scalar, drake::kSpaceDimension, Eigen::Isometry > | relativeTransform (const KinematicsCache< Scalar > &cache, int base_or_frame_ind, int body_or_frame_ind) const |
| template<typename Scalar > | |
| void | computeContactJacobians (const KinematicsCache< Scalar > &cache, Eigen::Ref< const Eigen::VectorXi > const &idxA, Eigen::Ref< const Eigen::VectorXi > const &idxB, Eigen::Ref< const Eigen::Matrix3Xd > const &xA, Eigen::Ref< const Eigen::Matrix3Xd > const &xB, Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > &J) const |
| computeContactJacobians More... | |
| DrakeCollision::ElementId | addCollisionElement (const RigidBody::CollisionElement &element, RigidBody &body, const std::string &group_name) |
| template<class UnaryPredicate > | |
| void | removeCollisionGroupsIf (UnaryPredicate test) |
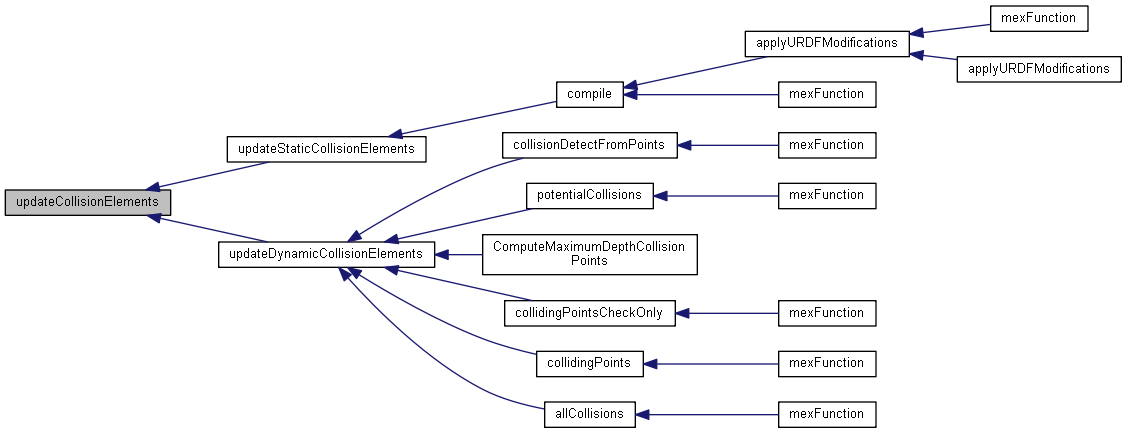
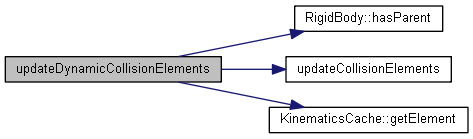
| void | updateCollisionElements (const RigidBody &body, const Eigen::Transform< double, 3, Eigen::Isometry > &transform_to_world) |
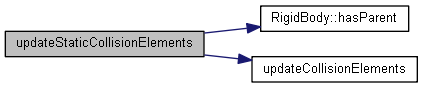
| void | updateStaticCollisionElements () |
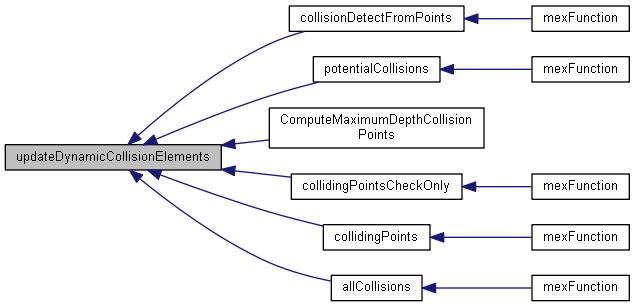
| void | updateDynamicCollisionElements (const KinematicsCache< double > &kin_cache) |
| void | getTerrainContactPoints (const RigidBody &body, Eigen::Matrix3Xd &terrain_points) const |
| bool | collisionRaycast (const KinematicsCache< double > &cache, const Eigen::Matrix3Xd &origins, const Eigen::Matrix3Xd &ray_endpoints, Eigen::VectorXd &distances, bool use_margins=false) |
| bool | collisionRaycast (const KinematicsCache< double > &cache, const Eigen::Matrix3Xd &origins, const Eigen::Matrix3Xd &ray_endpoints, Eigen::VectorXd &distances, Eigen::Matrix3Xd &normals, bool use_margins=false) |
| void | collisionDetectFromPoints (const KinematicsCache< double > &cache, const Eigen::Matrix3Xd &points, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &x, Eigen::Matrix3Xd &body_x, std::vector< int > &body_idx, bool use_margins) |
| collisionDetectFromPoints More... | |
| bool | collisionDetect (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, const std::vector< DrakeCollision::ElementId > &ids_to_check, bool use_margins) |
| bool | collisionDetect (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, const std::vector< int > &bodies_idx, const std::set< std::string > &active_element_groups, bool use_margins=true) |
| bool | collisionDetect (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, const std::vector< int > &bodies_idx, bool use_margins=true) |
| bool | collisionDetect (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, const std::set< std::string > &active_element_groups, bool use_margins=true) |
| bool | collisionDetect (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, bool use_margins=true) |
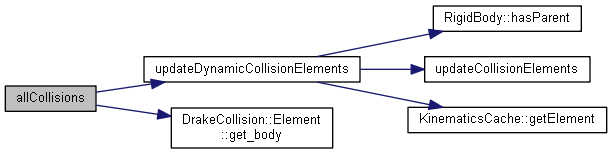
| bool | allCollisions (const KinematicsCache< double > &cache, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, Eigen::Matrix3Xd &ptsA, Eigen::Matrix3Xd &ptsB, bool use_margins=true) |
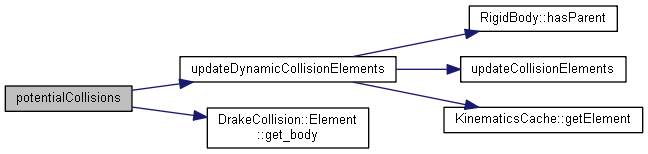
| void | potentialCollisions (const KinematicsCache< double > &cache, Eigen::VectorXd &phi, Eigen::Matrix3Xd &normal, Eigen::Matrix3Xd &xA, Eigen::Matrix3Xd &xB, std::vector< int > &bodyA_idx, std::vector< int > &bodyB_idx, bool use_margins=true) |
| std::vector< DrakeCollision::PointPair > | ComputeMaximumDepthCollisionPoints (const KinematicsCache< double > &cache, bool use_margins=true) |
| Computes the point of closest approach between bodies in the RigidBodyTree that are in contact. More... | |
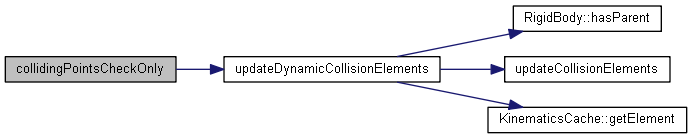
| virtual bool | collidingPointsCheckOnly (const KinematicsCache< double > &cache, const std::vector< Eigen::Vector3d > &points, double collision_threshold) |
| virtual std::vector< size_t > | collidingPoints (const KinematicsCache< double > &cache, const std::vector< Eigen::Vector3d > &points, double collision_threshold) |
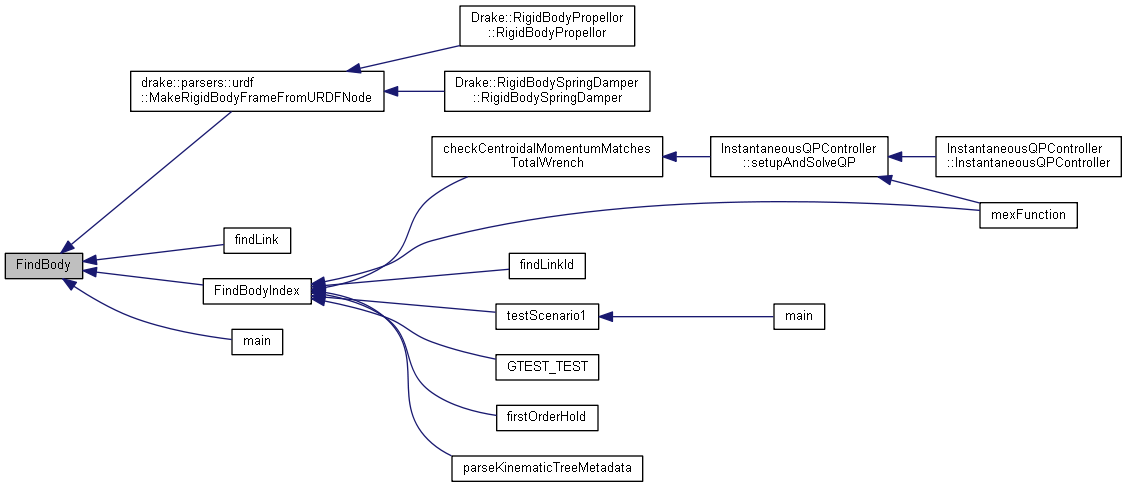
| RigidBody * | FindBody (const std::string &body_name, const std::string &model_name="", int model_id=-1) const |
Finds a body with the specified body_name belonging to a model with the specified model_name and model_id. More... | |
| RigidBody * | findLink (const std::string &link_name, const std::string &model_name="", int model_id=-1) const |
This is a deprecated version of FindBody(...). More... | |
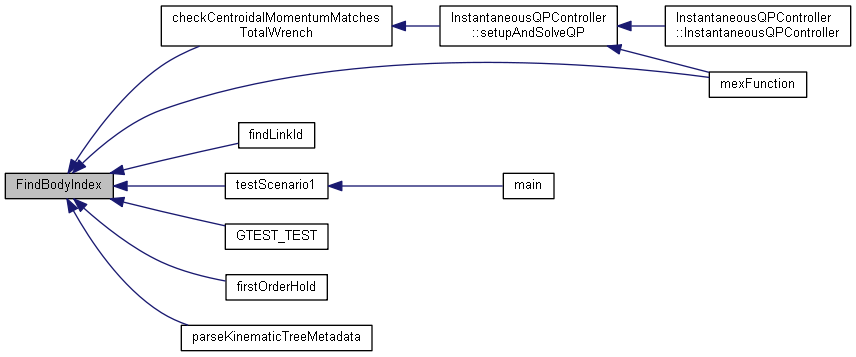
| int | FindBodyIndex (const std::string &body_name, int model_id=-1) const |
| Obtains the index of a rigid body within this rigid body tree. More... | |
| int | findLinkId (const std::string &link_name, int model_id=-1) const |
This is a deprecated version of FindBodyIndex(...). More... | |
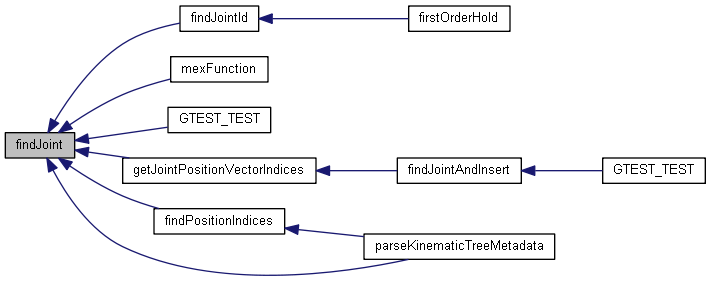
| RigidBody * | findJoint (const std::string &joint_name, int model_id=-1) const |
Obtains a pointer to the rigid body whose parent joint is named joint_name and is part of a model with ID model_id. More... | |
| int | findJointId (const std::string &joint_name, int model_id=-1) const |
| std::shared_ptr< RigidBodyFrame > | findFrame (const std::string &frame_name, int model_id=-1) const |
Finds a frame of the specified frame_name belonging to a model with the specified model_id. More... | |
| std::string | getBodyOrFrameName (int body_or_frame_id) const |
| const RigidBodyActuator & | GetActuator (const std::string &name) const |
| Obtains a rigid body actuator from this rigid body tree. More... | |
| template<typename Scalar > | |
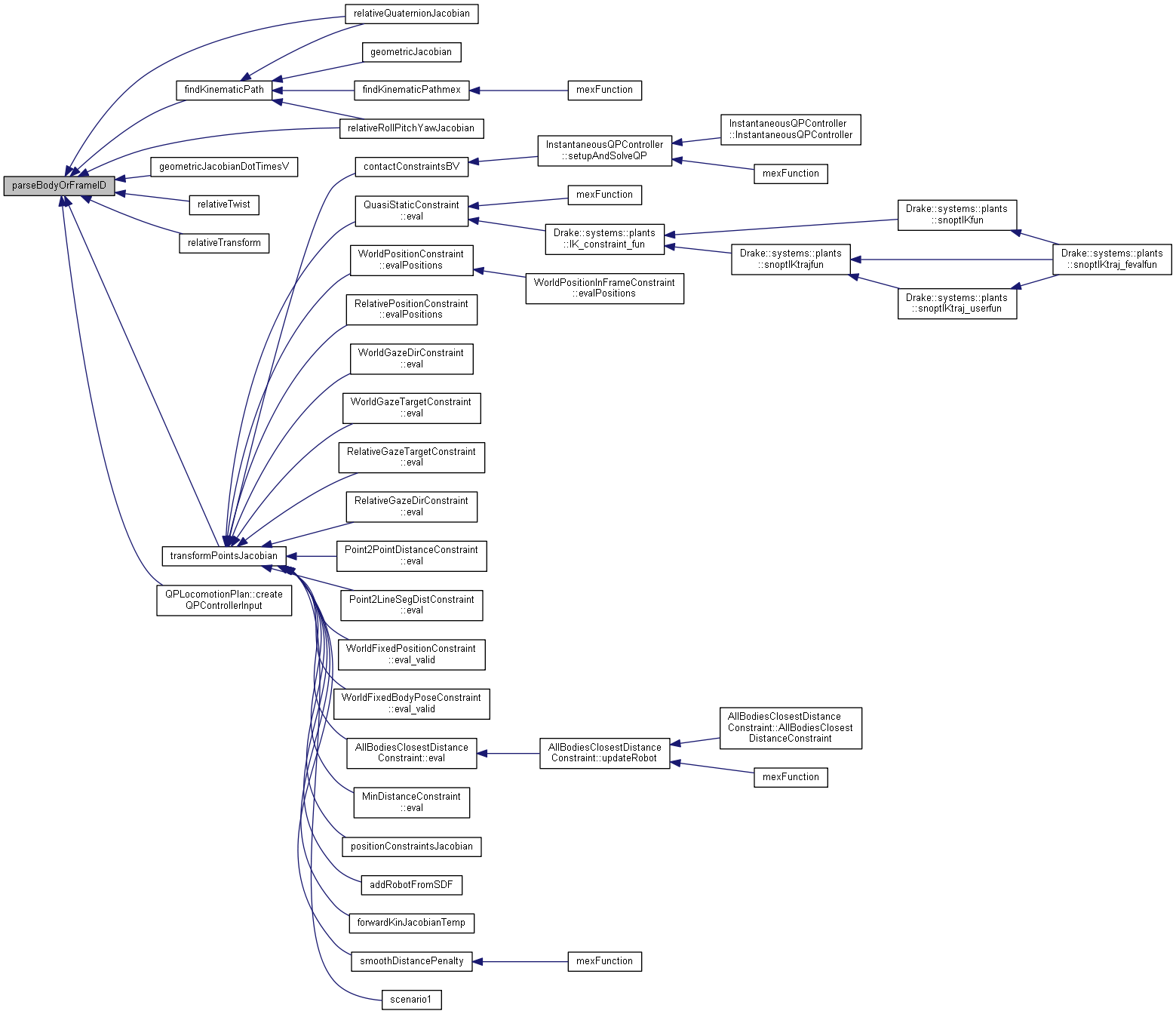
| int | parseBodyOrFrameID (const int body_or_frame_id, Eigen::Transform< Scalar, 3, Eigen::Isometry > *Tframe) const |
| int | parseBodyOrFrameID (const int body_or_frame_id) const |
| template<typename Scalar > | |
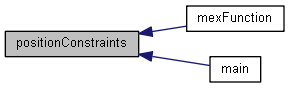
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | positionConstraints (const KinematicsCache< Scalar > &cache) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | positionConstraintsJacobian (const KinematicsCache< Scalar > &cache, bool in_terms_of_qdot=true) const |
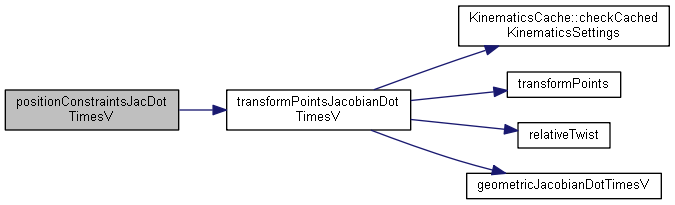
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | positionConstraintsJacDotTimesV (const KinematicsCache< Scalar > &cache) const |
| size_t | getNumPositionConstraints () const |
| template<typename Derived > | |
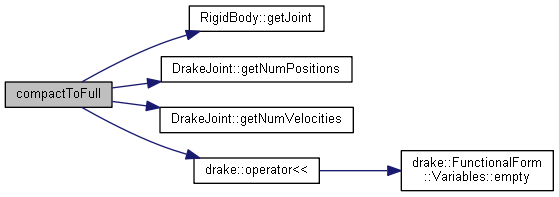
| Eigen::Matrix< typename Derived::Scalar, Derived::RowsAtCompileTime, Eigen::Dynamic > | compactToFull (const Eigen::MatrixBase< Derived > &compact, const std::vector< int > &joint_path, bool in_terms_of_qdot) const |
| void | add_rigid_body (std::unique_ptr< RigidBody > body) |
| Adds and takes ownership of a rigid body. More... | |
| int | AddFloatingJoint (DrakeJoint::FloatingBaseType floating_base_type, const std::vector< int > &link_indices, const std::shared_ptr< RigidBodyFrame > weld_to_frame=nullptr, const PoseMap *pose_map=nullptr) |
| Adds one floating joint to each link specified in the list of link indicies that does not already have a parent. More... | |
| RigidBody & | world () |
| Returns a mutable reference to the RigidBody associated with the world in the model. More... | |
| const RigidBody & | world () const |
| Returns a const reference to the RigidBody associated with the world in the model. More... | |
| int | number_of_positions () const |
| An accessor to the number of position states outputted by this rigid body system. More... | |
| int | number_of_velocities () const |
| An accessor to the number of velocity states outputted by this rigid body system. More... | |
| template<typename Scalar > | |
| TwistMatrix< Scalar > | worldMomentumMatrix (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| TwistVector< Scalar > | worldMomentumMatrixDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum) const |
| template<typename Scalar > | |
| TwistMatrix< Scalar > | centroidalMomentumMatrix (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| TwistVector< Scalar > | centroidalMomentumMatrixDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, SPACE_DIMENSION, 1 > | centerOfMass (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum) const |
| template<typename Scalar > | |
| Matrix< Scalar, SPACE_DIMENSION, Eigen::Dynamic > | centerOfMassJacobian (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| Matrix< Scalar, SPACE_DIMENSION, 1 > | centerOfMassJacobianDotTimesV (KinematicsCache< Scalar > &cache, const std::set< int > &robotnum) const |
| template<typename Scalar > | |
| int | parseBodyOrFrameID (const int body_or_frame_id, Eigen::Transform< Scalar, 3, Isometry > *Tframe) const |
| template<typename Scalar > | |
| TwistMatrix< Scalar > | geometricJacobian (const KinematicsCache< Scalar > &cache, int base_body_or_frame_ind, int end_effector_body_or_frame_ind, int expressed_in_body_or_frame_ind, bool in_terms_of_qdot, std::vector< int > *v_or_qdot_indices) const |
| template<typename Scalar > | |
| TwistVector< Scalar > | geometricJacobianDotTimesV (const KinematicsCache< Scalar > &cache, int base_body_or_frame_ind, int end_effector_body_or_frame_ind, int expressed_in_body_or_frame_ind) const |
| template<typename Scalar > | |
| TwistVector< Scalar > | relativeTwist (const KinematicsCache< Scalar > &cache, int base_or_frame_ind, int body_or_frame_ind, int expressed_in_body_or_frame_ind) const |
| template<typename Scalar > | |
| TwistVector< Scalar > | transformSpatialAcceleration (const KinematicsCache< Scalar > &cache, const TwistVector< Scalar > &spatial_acceleration, int base_ind, int body_ind, int old_expressed_in_body_or_frame_ind, int new_expressed_in_body_or_frame_ind) const |
| template<typename Scalar > | |
| Transform< Scalar, 3, Isometry > | relativeTransform (const KinematicsCache< Scalar > &cache, int base_or_frame_ind, int body_or_frame_ind) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | massMatrix (KinematicsCache< Scalar > &cache) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, 1 > | dynamicsBiasTerm (KinematicsCache< Scalar > &cache, const eigen_aligned_unordered_map< RigidBody const *, TwistVector< Scalar >> &f_ext, bool include_velocity_terms) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, 1 > | inverseDynamics (KinematicsCache< Scalar > &cache, const eigen_aligned_unordered_map< RigidBody const *, TwistVector< Scalar >> &f_ext, const Matrix< Scalar, Eigen::Dynamic, 1 > &vd, bool include_velocity_terms) const |
| template<typename DerivedV > | |
| Matrix< typename DerivedV::Scalar, Dynamic, 1 > | frictionTorques (Eigen::MatrixBase< DerivedV > const &v) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, QUAT_SIZE, Eigen::Dynamic > | relativeQuaternionJacobian (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| Eigen::Matrix< Scalar, RPY_SIZE, Eigen::Dynamic > | relativeRollPitchYawJacobian (const KinematicsCache< Scalar > &cache, int from_body_or_frame_ind, int to_body_or_frame_ind, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | forwardKinPositionGradient (const KinematicsCache< Scalar > &cache, int npoints, int from_body_or_frame_ind, int to_body_or_frame_ind) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, 1 > | positionConstraints (const KinematicsCache< Scalar > &cache) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > | positionConstraintsJacobian (const KinematicsCache< Scalar > &cache, bool in_terms_of_qdot) const |
| template<typename Scalar > | |
| Matrix< Scalar, Eigen::Dynamic, 1 > | positionConstraintsJacDotTimesV (const KinematicsCache< Scalar > &cache) const |
| template<typename DerivedA , typename DerivedB , typename DerivedC > | |
| void | jointLimitConstraints (MatrixBase< DerivedA > const &q, MatrixBase< DerivedB > &phi, MatrixBase< DerivedC > &J) const |
| template<typename Scalar > | |
| void | accumulateContactJacobian (const KinematicsCache< Scalar > &cache, const int bodyInd, Matrix3Xd const &bodyPoints, std::vector< size_t > const &cindA, std::vector< size_t > const &cindB, Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > &J) const |
| template<typename Scalar > | |
| void | computeContactJacobians (const KinematicsCache< Scalar > &cache, Ref< const VectorXi > const &idxA, Ref< const VectorXi > const &idxB, Ref< const Matrix3Xd > const &xA, Ref< const Matrix3Xd > const &xB, Matrix< Scalar, Dynamic, Dynamic > &J) const |
Public Attributes | |
| Eigen::VectorXd | joint_limit_min |
| Eigen::VectorXd | joint_limit_max |
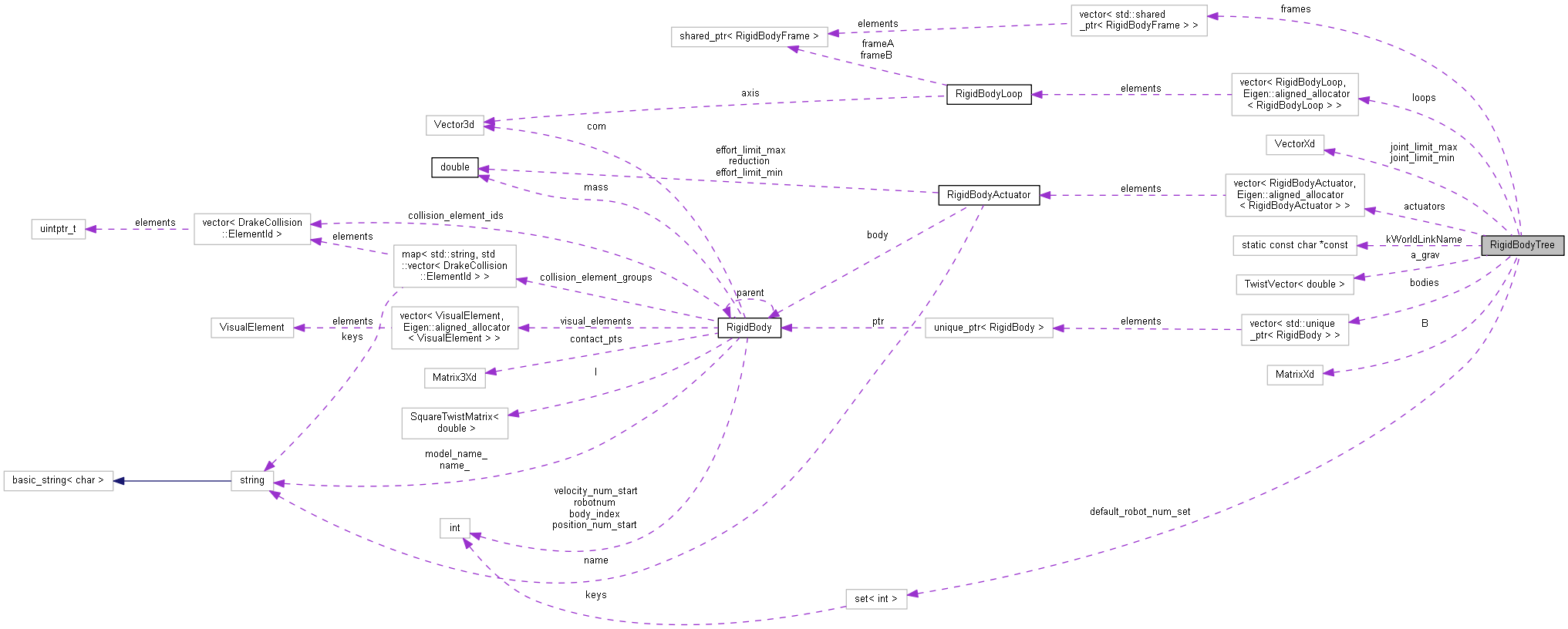
| std::vector< std::unique_ptr< RigidBody > > | bodies |
| std::vector< std::shared_ptr< RigidBodyFrame > > | frames |
| std::vector< RigidBodyActuator, Eigen::aligned_allocator< RigidBodyActuator > > | actuators |
| std::vector< RigidBodyLoop, Eigen::aligned_allocator< RigidBodyLoop > > | loops |
| drake::TwistVector< double > | a_grav |
| Eigen::MatrixXd | B |
Static Public Attributes | |
| static const char *const | kWorldLinkName = "world" |
| Defines the name of the rigid body within a rigid body tree that represents the world. More... | |
| static const std::set< int > | default_robot_num_set = {0} |
Friends | |
| DRAKERBM_EXPORT std::ostream & | operator<< (std::ostream &, const RigidBodyTree &) |
| A toString method for this class. More... | |
| RigidBodyTree | ( | const std::string & | urdf_filename, |
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::ROLLPITCHYAW |
||
| ) |

| RigidBodyTree | ( | void | ) |
|
virtual |
| void accumulateContactJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| const int | bodyInd, | ||
| Matrix3Xd const & | bodyPoints, | ||
| std::vector< size_t > const & | cindA, | ||
| std::vector< size_t > const & | cindB, | ||
| Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > & | J | ||
| ) | const |
| void add_rigid_body | ( | std::unique_ptr< RigidBody > | body | ) |
Adds and takes ownership of a rigid body.
A RigidBodyTree is the sole owner and manager of the RigidBody's in it. A body is assigned a unique id (RigidBody::id()) when added to a RigidBodyTree. This unique id can be use to access a body with the accessor RigidBodyTree::body.
| [in] | body | The rigid body to add to this rigid body tree. |
| DrakeCollision::ElementId addCollisionElement | ( | const RigidBody::CollisionElement & | element, |
| RigidBody & | body, | ||
| const std::string & | group_name | ||
| ) |

| int AddFloatingJoint | ( | DrakeJoint::FloatingBaseType | floating_base_type, |
| const std::vector< int > & | link_indices, | ||
| const std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr, |
||
| const PoseMap * | pose_map = nullptr |
||
| ) |
Adds one floating joint to each link specified in the list of link indicies that does not already have a parent.
Typically, the list of link indices is created while calling add_rigid_body(). The purpose of the floating joint is to connect the links and of their child branches to the rigid body tree.
| floating_base_type | The floating joint's type. |
| link_indices | A list of link indexes to check. A floating joint is added to any link in this list that does not have a parent joint. |
| weld_to_frame | The frame to which the floating joint should attach the parent-less non-world links. This parameter may be nullptr, in which case the link is welded to the world with zero offset. |
| pose_map | A mapping where the key is the link's name and the value is the transform from the frame of the link to the frame of the model to which the link belongs. |
| A | std::runtime_error if the floating_base_type is unrecognized or zero floating joints were added to the model. |
| void addFrame | ( | std::shared_ptr< RigidBodyFrame > | frame | ) |
| void addRobotFromSDF | ( | const std::string & | sdf_filename, |
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::QUATERNION, |
||
| std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr |
||
| ) |
| void addRobotFromURDF | ( | const std::string & | urdf_filename, |
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::ROLLPITCHYAW, |
||
| std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr |
||
| ) |

| void addRobotFromURDF | ( | const std::string & | urdf_filename, |
| std::map< std::string, std::string > & | package_map, | ||
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::ROLLPITCHYAW, |
||
| std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr |
||
| ) |

| void addRobotFromURDFString | ( | const std::string & | xml_string, |
| const std::string & | root_dir = ".", |
||
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::ROLLPITCHYAW, |
||
| std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr |
||
| ) |

| void addRobotFromURDFString | ( | const std::string & | xml_string, |
| std::map< std::string, std::string > & | package_map, | ||
| const std::string & | root_dir = ".", |
||
| const DrakeJoint::FloatingBaseType | floating_base_type = DrakeJoint::ROLLPITCHYAW, |
||
| std::shared_ptr< RigidBodyFrame > | weld_to_frame = nullptr |
||
| ) |

| bool allCollisions | ( | const KinematicsCache< double > & | cache, |
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| Eigen::Matrix3Xd & | ptsA, | ||
| Eigen::Matrix3Xd & | ptsB, | ||
| bool | use_margins = true |
||
| ) |

| Eigen::Matrix<Scalar, drake::kSpaceDimension, 1> centerOfMass | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set |
||
| ) | const |
| Eigen::Matrix<Scalar, SPACE_DIMENSION, 1> centerOfMass | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum | ||
| ) | const |
| Eigen::Matrix<Scalar, drake::kSpaceDimension, Eigen::Dynamic> centerOfMassJacobian | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set, |
||
| bool | in_terms_of_qdot = false |
||
| ) | const |

| Matrix<Scalar, SPACE_DIMENSION, Eigen::Dynamic> centerOfMassJacobian | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| Eigen::Matrix<Scalar, drake::kSpaceDimension, 1> centerOfMassJacobianDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set |
||
| ) | const |
| Matrix<Scalar, SPACE_DIMENSION, 1> centerOfMassJacobianDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum | ||
| ) | const |

| drake::TwistMatrix<Scalar> centroidalMomentumMatrix | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set, |
||
| bool | in_terms_of_qdot = false |
||
| ) | const |
| TwistMatrix<Scalar> centroidalMomentumMatrix | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| drake::TwistVector<Scalar> centroidalMomentumMatrixDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set |
||
| ) | const |

| TwistVector<Scalar> centroidalMomentumMatrixDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum | ||
| ) | const |

|
virtual |

|
virtual |

| bool collisionDetect | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| const std::vector< DrakeCollision::ElementId > & | ids_to_check, | ||
| bool | use_margins | ||
| ) |
| bool collisionDetect | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| const std::vector< int > & | bodies_idx, | ||
| const std::set< std::string > & | active_element_groups, | ||
| bool | use_margins = true |
||
| ) |
| bool collisionDetect | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| const std::vector< int > & | bodies_idx, | ||
| bool | use_margins = true |
||
| ) |
| bool collisionDetect | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| const std::set< std::string > & | active_element_groups, | ||
| bool | use_margins = true |
||
| ) |
| bool collisionDetect | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| bool | use_margins = true |
||
| ) |
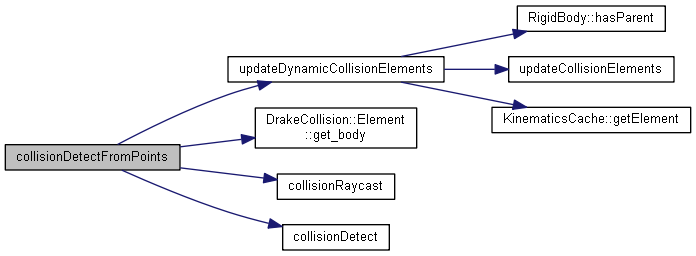
| void collisionDetectFromPoints | ( | const KinematicsCache< double > & | cache, |
| const Eigen::Matrix3Xd & | points, | ||
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | x, | ||
| Eigen::Matrix3Xd & | body_x, | ||
| std::vector< int > & | body_idx, | ||
| bool | use_margins | ||
| ) |
collisionDetectFromPoints
Computes the (signed) distance from the given points to the nearest body in the RigidBodyTree.

| bool collisionRaycast | ( | const KinematicsCache< double > & | cache, |
| const Eigen::Matrix3Xd & | origins, | ||
| const Eigen::Matrix3Xd & | ray_endpoints, | ||
| Eigen::VectorXd & | distances, | ||
| bool | use_margins = false |
||
| ) |

| bool collisionRaycast | ( | const KinematicsCache< double > & | cache, |
| const Eigen::Matrix3Xd & | origins, | ||
| const Eigen::Matrix3Xd & | ray_endpoints, | ||
| Eigen::VectorXd & | distances, | ||
| Eigen::Matrix3Xd & | normals, | ||
| bool | use_margins = false |
||
| ) |
|
inline |
| void compile | ( | void | ) |
| void computeContactJacobians | ( | const KinematicsCache< Scalar > & | cache, |
| Ref< const VectorXi > const & | idxA, | ||
| Ref< const VectorXi > const & | idxB, | ||
| Ref< const Matrix3Xd > const & | xA, | ||
| Ref< const Matrix3Xd > const & | xB, | ||
| Matrix< Scalar, Dynamic, Dynamic > & | J | ||
| ) | const |
| void computeContactJacobians | ( | const KinematicsCache< Scalar > & | cache, |
| Eigen::Ref< const Eigen::VectorXi > const & | idxA, | ||
| Eigen::Ref< const Eigen::VectorXi > const & | idxB, | ||
| Eigen::Ref< const Eigen::Matrix3Xd > const & | xA, | ||
| Eigen::Ref< const Eigen::Matrix3Xd > const & | xB, | ||
| Eigen::Matrix< Scalar, Eigen::Dynamic, Eigen::Dynamic > & | J | ||
| ) | const |
computeContactJacobians
Computes the jacobian for many points in the format currently used by matlab. (possibly should be scheduled for deletion, taking accumulateContactJacobians with it)

| std::vector< DrakeCollision::PointPair > ComputeMaximumDepthCollisionPoints | ( | const KinematicsCache< double > & | cache, |
| bool | use_margins = true |
||
| ) |
Computes the point of closest approach between bodies in the RigidBodyTree that are in contact.
| cache[in] | a KinematicsCache constructed by RigidBodyTree::doKinematics given q and v. |
Collision points are returned as a vector of PointPair's. See the documentation for PointPair for details. The collision point on the surface of each body is stored in the PointPair structure in the frame of the corresponding body.
| use_margins[in] | If true the model uses the representation with margins. If false, the representation without margins is used instead. |

| map< string, int > computePositionNameToIndexMap | ( | ) | const |


| KinematicsCache< typename DerivedQ::Scalar > doKinematics | ( | const Eigen::MatrixBase< DerivedQ > & | q | ) | const |
Initializes a KinematicsCache with the given configuration q, computes the kinematics, and returns the cache.
This method is explicitly instantiated in RigidBodyTree.cpp for a small set of supported DerivedQ.

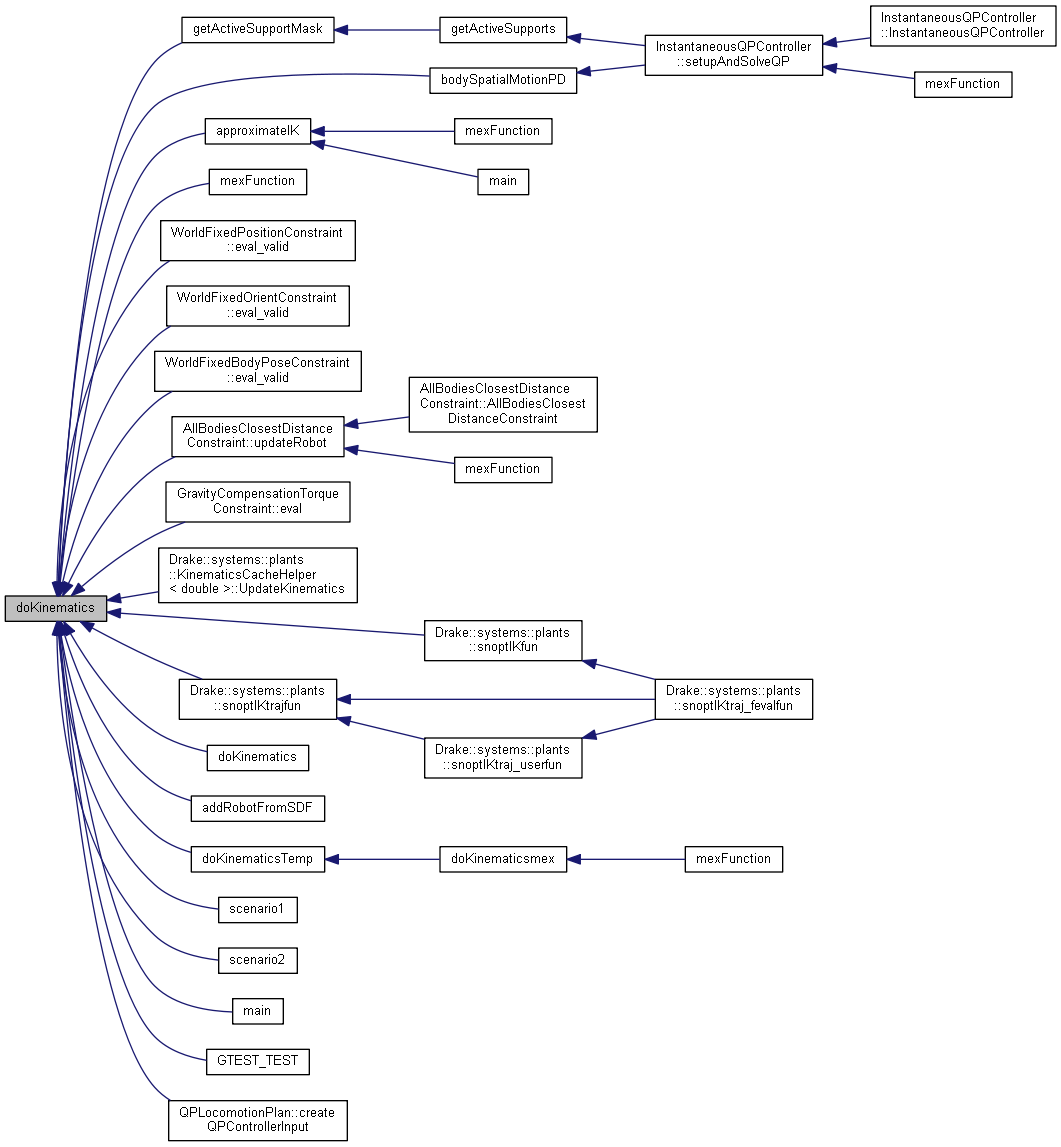
| KinematicsCache< typename DerivedQ::Scalar > doKinematics | ( | const Eigen::MatrixBase< DerivedQ > & | q, |
| const Eigen::MatrixBase< DerivedV > & | v, | ||
| bool | compute_JdotV = true |
||
| ) | const |
Initializes a KinematicsCache with the given configuration q and velocity v, computes the kinematics, and returns the cache.
This method is explicitly instantiated in RigidBodyTree.cpp for a small set of supported DerivedQ and DerivedV.

| void doKinematics | ( | KinematicsCache< Scalar > & | cache, |
| bool | compute_JdotV = false |
||
| ) | const |
Computes the kinematics on the given cache.
This method is explicitly instantiated in RigidBodyTree.cpp for a small set of supported Scalar types.
| void drawKinematicTree | ( | std::string | graphviz_dotfile_filename | ) | const |
| Eigen::Matrix<Scalar, Eigen::Dynamic, 1> dynamicsBiasTerm | ( | KinematicsCache< Scalar > & | cache, |
| const eigen_aligned_unordered_map< RigidBody const *, drake::TwistVector< Scalar >> & | f_ext, | ||
| bool | include_velocity_terms = true |
||
| ) | const |
Compute the term \( C(q, v, f_\text{ext}) \) in the manipulator equations
\[ H(q) \dot{v} + C(q, v, f_\text{ext}) = B(q) u \]
.
Convenience method that calls inverseDynamics with \( \dot{v} = 0 \). See inverseDynamics for argument descriptions.
| Matrix<Scalar, Eigen::Dynamic, 1> dynamicsBiasTerm | ( | KinematicsCache< Scalar > & | cache, |
| const eigen_aligned_unordered_map< RigidBody const *, TwistVector< Scalar >> & | f_ext, | ||
| bool | include_velocity_terms | ||
| ) | const |

| void findAncestorBodies | ( | std::vector< int > & | ancestor_bodies, |
| int | body | ||
| ) | const |

| RigidBody * FindBody | ( | const std::string & | body_name, |
| const std::string & | model_name = "", |
||
| int | model_id = -1 |
||
| ) | const |
Finds a body with the specified body_name belonging to a model with the specified model_name and model_id.
Note that if model_name is the empty string and model_id is -1, every model is searched. If model_name and model_id are inconsistent, no body will be found and an exception will be thrown.
| [in] | body_name | The name of the body to find. |
| [in] | model_name | The name of the model to which the body belongs. If this value is an empty string, every model is searched. |
| [in] | model_id | The ID of the model to which the body belongs. If this value is -1, every model is searched. |
| std::logic_error | if multiple matching bodies are found or no matching bodies are found. |

| int FindBodyIndex | ( | const std::string & | body_name, |
| int | model_id = -1 |
||
| ) | const |
Obtains the index of a rigid body within this rigid body tree.
The rigid body tree maintains a vector of pointers to all rigid bodies that are part of the rigid body tree. The index of a rigid body is the index within this vector at which a pointer to the rigid body is stored.
| [in] | body_name | The body whose index we want to find. It should be unique within the searched models, otherwise an exception will be thrown. |
| [in] | model_id | The ID of the model. This parameter is optional. If supplied, only the model with the specified ID is searched; otherwise, all models are searched. |
| std::logic_error | if no rigid body with the specified body_name and model_id was found or if multiple matching rigid bodies were found. |

| shared_ptr< RigidBodyFrame > findFrame | ( | const std::string & | frame_name, |
| int | model_id = -1 |
||
| ) | const |
Finds a frame of the specified frame_name belonging to a model with the specified model_id.
| [in] | frame_name | The name of the frame to find. |
| [in] | model_id | The ID of the model to which the frame belongs. If this value is -1, search all models. |
| std::logic_error | if multiple matching frames are found. |


| RigidBody * findJoint | ( | const std::string & | joint_name, |
| int | model_id = -1 |
||
| ) | const |
Obtains a pointer to the rigid body whose parent joint is named joint_name and is part of a model with ID model_id.
| [in] | joint_name | The name of the joint to find. |
| [in] | model_id | The ID of the model that contains the joint. This parameter is optional. If supplied, only that model is searched; otherwise, all models are searched. |
| std::logic_error | if no joint is found with the given name within the searched model(s). |

| int findJointId | ( | const std::string & | joint_name, |
| int | model_id = -1 |
||
| ) | const |


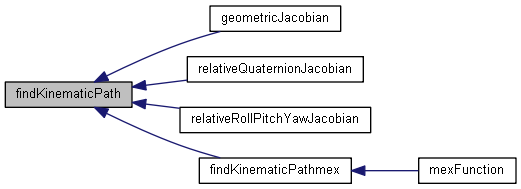
| KinematicPath findKinematicPath | ( | int | start_body_or_frame_idx, |
| int | end_body_or_frame_idx | ||
| ) | const |

| RigidBody * findLink | ( | const std::string & | link_name, |
| const std::string & | model_name = "", |
||
| int | model_id = -1 |
||
| ) | const |
This is a deprecated version of FindBody(...).
Please use FindBody(...) instead.

| int findLinkId | ( | const std::string & | link_name, |
| int | model_id = -1 |
||
| ) | const |
This is a deprecated version of FindBodyIndex(...).
Please use FindBodyIndex(...) instead.

| Eigen::Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> forwardKinPositionGradient | ( | const KinematicsCache< Scalar > & | cache, |
| int | npoints, | ||
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind | ||
| ) | const |
| Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> forwardKinPositionGradient | ( | const KinematicsCache< Scalar > & | cache, |
| int | npoints, | ||
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind | ||
| ) | const |
| Eigen::Matrix<typename DerivedV::Scalar, Eigen::Dynamic, 1> frictionTorques | ( | Eigen::MatrixBase< DerivedV > const & | v | ) | const |

| Matrix<typename DerivedV::Scalar, Dynamic, 1> frictionTorques | ( | Eigen::MatrixBase< DerivedV > const & | v | ) | const |
| drake::TwistMatrix<Scalar> geometricJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_body_or_frame_ind, | ||
| int | end_effector_body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind, | ||
| bool | in_terms_of_qdot = false, |
||
| std::vector< int > * | v_indices = nullptr |
||
| ) | const |
| TwistMatrix<Scalar> geometricJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_body_or_frame_ind, | ||
| int | end_effector_body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind, | ||
| bool | in_terms_of_qdot, | ||
| std::vector< int > * | v_or_qdot_indices | ||
| ) | const |
| drake::TwistVector<Scalar> geometricJacobianDotTimesV | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_body_or_frame_ind, | ||
| int | end_effector_body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind | ||
| ) | const |
| TwistVector<Scalar> geometricJacobianDotTimesV | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_body_or_frame_ind, | ||
| int | end_effector_body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind | ||
| ) | const |
|
inline |
Returns an integer that will be used as a unique ID for the next model to be added within the rigid body tree.
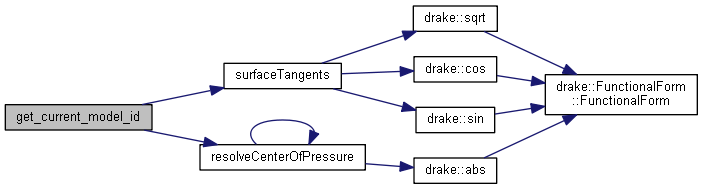
|
inline |
Returns an integer that can be used to uniquely identify a model within this rigid body tree.
Note that this method is not thread safe!
| const RigidBodyActuator & GetActuator | ( | const std::string & | name | ) | const |
Obtains a rigid body actuator from this rigid body tree.
The actuator is selected based on its name.
| name | The name of the rigid body actuator to get. |
name. | std::invalid_argument | if no rigid body actuator with name name exists. |
| std::string getBodyOrFrameName | ( | int | body_or_frame_id | ) | const |

| double getMass | ( | const std::set< int > & | robotnum = default_robot_num_set | ) | const |

| int getNumContacts | ( | const std::set< int > & | body_idx | ) | const |
| size_t getNumJointLimitConstraints | ( | ) | const |


| size_t getNumPositionConstraints | ( | ) | const |
| string getPositionName | ( | int | position_num | ) | const |

| Eigen::VectorXd getRandomConfiguration | ( | std::default_random_engine & | generator | ) | const |
| string getStateName | ( | int | state_num | ) | const |
| void getTerrainContactPoints | ( | const RigidBody & | body, |
| Eigen::Matrix3Xd & | terrain_points | ||
| ) | const |

| string getVelocityName | ( | int | velocity_num | ) | const |

| Eigen::VectorXd getZeroConfiguration | ( | ) | const |
| Eigen::Matrix<Scalar, Eigen::Dynamic, 1> inverseDynamics | ( | KinematicsCache< Scalar > & | cache, |
| const eigen_aligned_unordered_map< RigidBody const *, drake::TwistVector< Scalar >> & | f_ext, | ||
| const Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > & | vd, | ||
| bool | include_velocity_terms = true |
||
| ) | const |
Compute
\[ H(q) \dot{v} + C(q, v, f_\text{ext}) \]
that is, the left hand side of the manipulator equations
\[ H(q) \dot{v} + C(q, v, f_\text{ext}) = B(q) u \]
.
Note that the 'dynamics bias term' \( C(q, v, f_\text{ext}) \) can be computed by simply setting \( \dot{v} = 0\). Note also that if only the gravitational terms contained in \( C(q, v, *f_\text{ext}) \) are required, one can set include_velocity_terms to false. Alternatively, one can pass in a KinematicsCache created with \( v = 0\) or without specifying the velocity vector.
Algorithm: recursive Newton-Euler. Does not explicitly compute mass matrix.
| cache | a KinematicsCache constructed given \( q \) and \( v \) |
| f_ext | external wrenches exerted upon bodies. Expressed in body frame. |
| vd | \( \dot{v} \) |
| include_velocity_terms | whether to include velocity-dependent terms in \( C(q, v, f_\text{ext}) \). Setting include_velocity_terms to false is Equivalent to setting \( v = 0 \) |
| Matrix<Scalar, Eigen::Dynamic, 1> inverseDynamics | ( | KinematicsCache< Scalar > & | cache, |
| const eigen_aligned_unordered_map< RigidBody const *, TwistVector< Scalar >> & | f_ext, | ||
| const Matrix< Scalar, Eigen::Dynamic, 1 > & | vd, | ||
| bool | include_velocity_terms | ||
| ) | const |
| bool isBodyPartOfRobot | ( | const RigidBody & | body, |
| const std::set< int > & | robotnum | ||
| ) | const |

| void jointLimitConstraints | ( | Eigen::MatrixBase< DerivedA > const & | q, |
| Eigen::MatrixBase< DerivedB > & | phi, | ||
| Eigen::MatrixBase< DerivedC > & | J | ||
| ) | const |
| void jointLimitConstraints | ( | MatrixBase< DerivedA > const & | q, |
| MatrixBase< DerivedB > & | phi, | ||
| MatrixBase< DerivedC > & | J | ||
| ) | const |

| Eigen::Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> massMatrix | ( | KinematicsCache< Scalar > & | cache | ) | const |
Compute the positive definite mass (configuration space) matrix \( *H(q) \), defined by \(T = \frac{1}{2} v^T H(q) v \), where \( T \) is kinetic energy.
The mass matrix also appears in the manipulator equations
\[ H(q) \dot{v} + C(q, v, f_\text{ext}) = B(q) u \]
| cache | a KinematicsCache constructed given \( q \) |
| Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> massMatrix | ( | KinematicsCache< Scalar > & | cache | ) | const |
|
inline |
An accessor to the number of position states outputted by this rigid body system.
|
inline |
An accessor to the number of velocity states outputted by this rigid body system.
| int parseBodyOrFrameID | ( | const int | body_or_frame_id, |
| Eigen::Transform< Scalar, 3, Eigen::Isometry > * | Tframe | ||
| ) | const |
| int parseBodyOrFrameID | ( | const int | body_or_frame_id | ) | const |
| int parseBodyOrFrameID | ( | const int | body_or_frame_id, |
| Eigen::Transform< Scalar, 3, Isometry > * | Tframe | ||
| ) | const |
| Eigen::Matrix<Scalar, Eigen::Dynamic, 1> positionConstraints | ( | const KinematicsCache< Scalar > & | cache | ) | const |
| Matrix<Scalar, Eigen::Dynamic, 1> positionConstraints | ( | const KinematicsCache< Scalar > & | cache | ) | const |

| Eigen::Matrix<Scalar, Eigen::Dynamic, 1> positionConstraintsJacDotTimesV | ( | const KinematicsCache< Scalar > & | cache | ) | const |
| Matrix<Scalar, Eigen::Dynamic, 1> positionConstraintsJacDotTimesV | ( | const KinematicsCache< Scalar > & | cache | ) | const |
| Eigen::Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> positionConstraintsJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| bool | in_terms_of_qdot = true |
||
| ) | const |
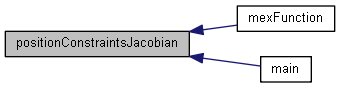
| Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> positionConstraintsJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| bool | in_terms_of_qdot | ||
| ) | const |
| void potentialCollisions | ( | const KinematicsCache< double > & | cache, |
| Eigen::VectorXd & | phi, | ||
| Eigen::Matrix3Xd & | normal, | ||
| Eigen::Matrix3Xd & | xA, | ||
| Eigen::Matrix3Xd & | xB, | ||
| std::vector< int > & | bodyA_idx, | ||
| std::vector< int > & | bodyB_idx, | ||
| bool | use_margins = true |
||
| ) |

|
inline |

| Eigen::Matrix<Scalar, drake::kQuaternionSize, Eigen::Dynamic> relativeQuaternionJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| Eigen::Matrix<Scalar, QUAT_SIZE, Eigen::Dynamic> relativeQuaternionJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| template DRAKERBM_EXPORT VectorX< AutoDiffXd > relativeQuaternionJacobianDotTimesV< AutoDiffXd > | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind | ||
| ) | const |

|
inline |

| Eigen::Matrix<Scalar, drake::kRpySize, Eigen::Dynamic> relativeRollPitchYawJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| Eigen::Matrix<Scalar, RPY_SIZE, Eigen::Dynamic> relativeRollPitchYawJacobian | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| template DRAKERBM_EXPORT VectorX< AutoDiffUpTo73d > relativeRollPitchYawJacobianDotTimesV< AutoDiffUpTo73d > | ( | const KinematicsCache< Scalar > & | cache, |
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind | ||
| ) | const |

| Eigen::Transform<Scalar, drake::kSpaceDimension, Eigen::Isometry> relativeTransform | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_or_frame_ind, | ||
| int | body_or_frame_ind | ||
| ) | const |
| Transform<Scalar, 3, Isometry> relativeTransform | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_or_frame_ind, | ||
| int | body_or_frame_ind | ||
| ) | const |
| drake::TwistVector<Scalar> relativeTwist | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_or_frame_ind, | ||
| int | body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind | ||
| ) | const |
| TwistVector<Scalar> relativeTwist | ( | const KinematicsCache< Scalar > & | cache, |
| int | base_or_frame_ind, | ||
| int | body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind | ||
| ) | const |
|
inline |

| template DRAKERBM_EXPORT pair< Vector3d, double > resolveCenterOfPressure< Vector3d, Vector3d > | ( | const KinematicsCache< double > & | cache, |
| const std::vector< ForceTorqueMeasurement > & | force_torque_measurements, | ||
| const Eigen::MatrixBase< DerivedNormal > & | normal, | ||
| const Eigen::MatrixBase< DerivedPoint > & | point_on_contact_plane | ||
| ) | const |
Computes CoP in world frame.
Normal and point on contact plane should be in world frame too.

| void surfaceTangents | ( | Eigen::Map< Eigen::Matrix3Xd > const & | normals, |
| std::vector< Eigen::Map< Eigen::Matrix3Xd >> & | tangents | ||
| ) | const |

| bool transformCollisionFrame | ( | const DrakeCollision::ElementId & | eid, |
| const Eigen::Isometry3d & | transform_body_to_joint | ||
| ) |
Updates the frame of collision elements to be equal to the joint's frame.
| eid | The ID of the collision element to update. |
| transform_body_to_joint | The transform from the model's body frame to the joint frame. |
|
inline |
| template DRAKERBM_EXPORT MatrixXd transformPointsJacobian< double, Vector3d > | ( | const KinematicsCache< Scalar > & | cache, |
| const Eigen::MatrixBase< DerivedPoints > & | points, | ||
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| template DRAKERBM_EXPORT VectorXd transformPointsJacobianDotTimesV< double, Vector3d > | ( | const KinematicsCache< Scalar > & | cache, |
| const Eigen::MatrixBase< DerivedPoints > & | points, | ||
| int | from_body_or_frame_ind, | ||
| int | to_body_or_frame_ind | ||
| ) | const |
| drake::TwistVector<Scalar> transformSpatialAcceleration | ( | const KinematicsCache< Scalar > & | cache, |
| const drake::TwistVector< Scalar > & | spatial_acceleration, | ||
| int | base_or_frame_ind, | ||
| int | body_or_frame_ind, | ||
| int | old_body_or_frame_ind, | ||
| int | new_body_or_frame_ind | ||
| ) | const |

| TwistVector<Scalar> transformSpatialAcceleration | ( | const KinematicsCache< Scalar > & | cache, |
| const TwistVector< Scalar > & | spatial_acceleration, | ||
| int | base_ind, | ||
| int | body_ind, | ||
| int | old_expressed_in_body_or_frame_ind, | ||
| int | new_expressed_in_body_or_frame_ind | ||
| ) | const |
| void updateCollisionElements | ( | const RigidBody & | body, |
| const Eigen::Transform< double, 3, Eigen::Isometry > & | transform_to_world | ||
| ) |
| void updateDynamicCollisionElements | ( | const KinematicsCache< double > & | kin_cache | ) |
| void updateStaticCollisionElements | ( | ) |

|
inline |
Returns a mutable reference to the RigidBody associated with the world in the model.
This is the root of the RigidBodyTree.

|
inline |
Returns a const reference to the RigidBody associated with the world in the model.
This is the root of the RigidBodyTree.
| drake::TwistMatrix<Scalar> worldMomentumMatrix | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set, |
||
| bool | in_terms_of_qdot = false |
||
| ) | const |
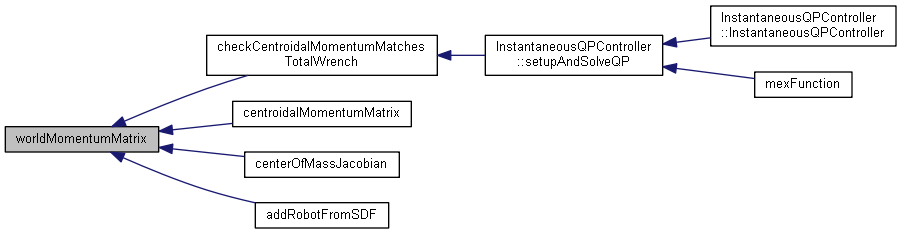
| TwistMatrix<Scalar> worldMomentumMatrix | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum, | ||
| bool | in_terms_of_qdot | ||
| ) | const |
| drake::TwistVector<Scalar> worldMomentumMatrixDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum = default_robot_num_set |
||
| ) | const |

| TwistVector<Scalar> worldMomentumMatrixDotTimesV | ( | KinematicsCache< Scalar > & | cache, |
| const std::set< int > & | robotnum | ||
| ) | const |
|
friend |
A toString method for this class.
| drake::TwistVector<double> a_grav |
| std::vector<RigidBodyActuator, Eigen::aligned_allocator<RigidBodyActuator> > actuators |
| Eigen::MatrixXd B |
| std::vector<std::unique_ptr<RigidBody> > bodies |
|
static |
| std::vector<std::shared_ptr<RigidBodyFrame> > frames |
| Eigen::VectorXd joint_limit_max |
| Eigen::VectorXd joint_limit_min |
|
static |
Defines the name of the rigid body within a rigid body tree that represents the world.
| std::vector<RigidBodyLoop, Eigen::aligned_allocator<RigidBodyLoop> > loops |
 1.8.11
1.8.11 
