#include <drake/systems/plants/KinematicsCache.h>
|
| | KinematicsCache (const std::vector< std::unique_ptr< RigidBody > > &bodies) |
| |
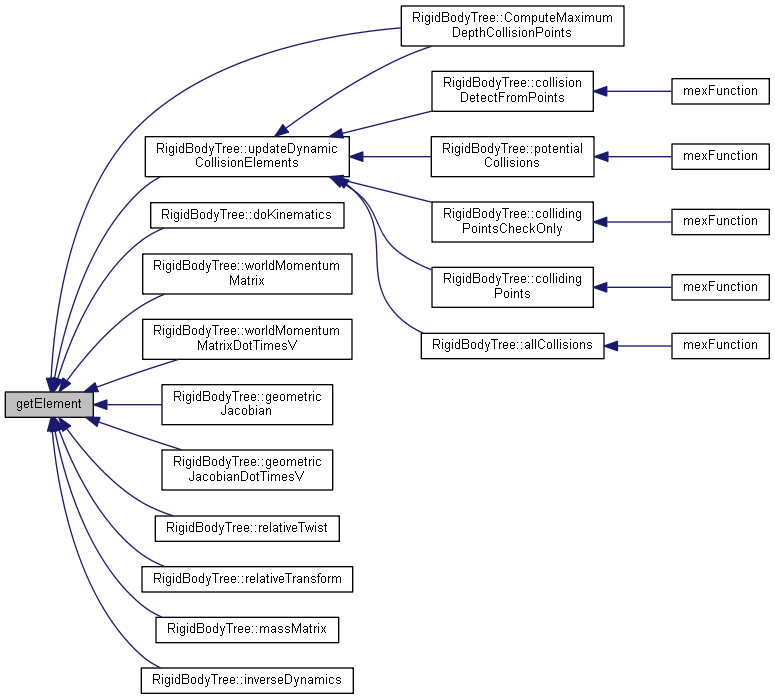
| KinematicsCacheElement< Scalar > & | getElement (const RigidBody &body) |
| |
| const KinematicsCacheElement< Scalar > & | getElement (const RigidBody &body) const |
| |
| template<typename Derived > |
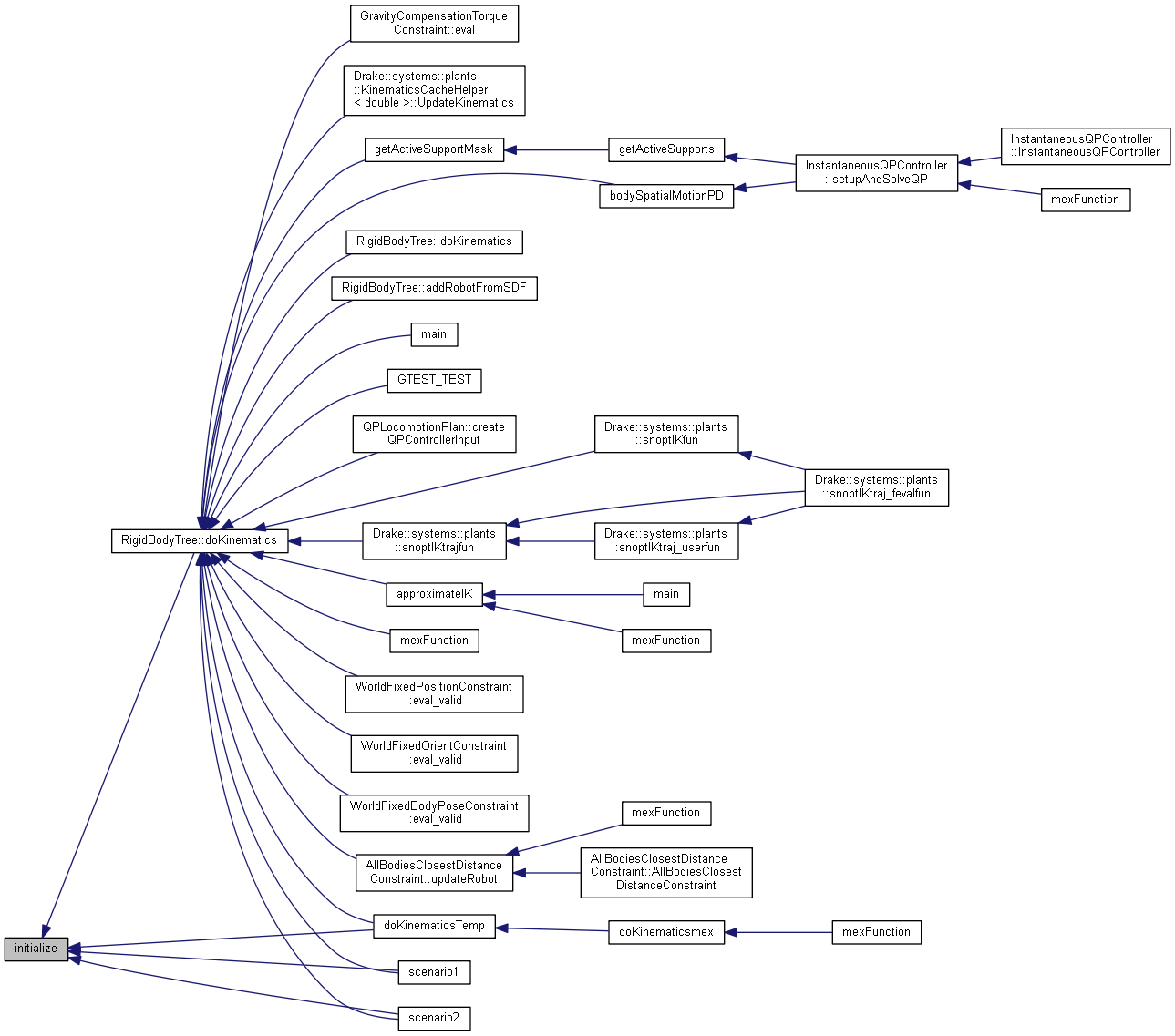
| void | initialize (const Eigen::MatrixBase< Derived > &q) |
| |
| template<typename DerivedQ , typename DerivedV > |
| void | initialize (const Eigen::MatrixBase< DerivedQ > &q, const Eigen::MatrixBase< DerivedV > &v) |
| |
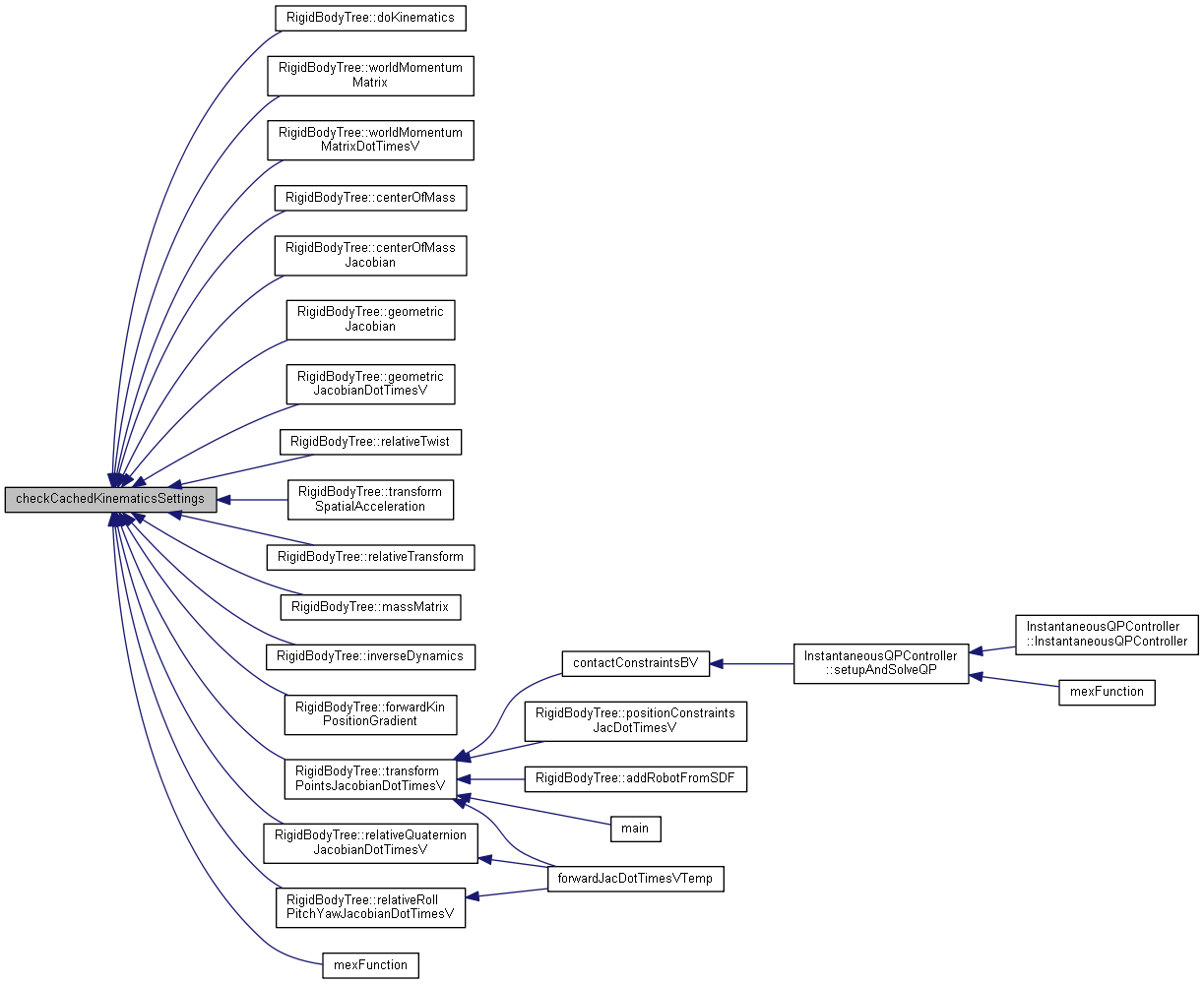
| void | checkCachedKinematicsSettings (bool velocity_kinematics_required, bool jdot_times_v_required, const std::string &method_name) const |
| |
| template<typename Derived > |
| Eigen::Matrix< typename Derived::Scalar, Derived::RowsAtCompileTime, Eigen::Dynamic > | transformVelocityMappingToPositionDotMapping (const Eigen::MatrixBase< Derived > &mat) const |
| |
| template<typename Derived > |
| Eigen::Matrix< typename Derived::Scalar, Derived::RowsAtCompileTime, Eigen::Dynamic > | transformPositionDotMappingToVelocityMapping (const Eigen::MatrixBase< Derived > &mat) const |
| |
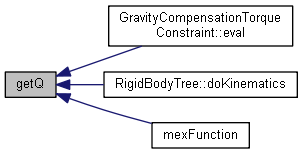
| const Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > & | getQ () const |
| |
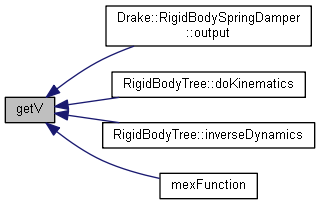
| const Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > & | getV () const |
| |
| Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > | getX () const |
| |
| bool | hasV () const |
| |
| void | setInertiasCached () |
| |
| bool | areInertiasCached () |
| |
| void | setPositionKinematicsCached () |
| |
| void | setJdotVCached (bool jdotV_cached) |
| |
| int | getNumPositions () const |
| |
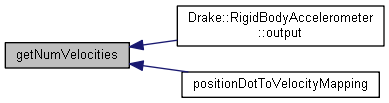
| int | getNumVelocities () const |
| |
| bool areInertiasCached |
( |
| ) |
|
|
inline |
| void checkCachedKinematicsSettings |
( |
bool |
velocity_kinematics_required, |
|
|
bool |
jdot_times_v_required, |
|
|
const std::string & |
method_name |
|
) |
| const |
|
inline |
| int getNumPositions |
( |
| ) |
const |
|
inline |
| int getNumVelocities |
( |
| ) |
const |
|
inline |
| const Eigen::Matrix<Scalar, Eigen::Dynamic, 1>& getQ |
( |
| ) |
const |
|
inline |
| const Eigen::Matrix<Scalar, Eigen::Dynamic, 1>& getV |
( |
| ) |
const |
|
inline |
| Eigen::Matrix<Scalar, Eigen::Dynamic, 1> getX |
( |
| ) |
const |
|
inline |
| void initialize |
( |
const Eigen::MatrixBase< Derived > & |
q | ) |
|
|
inline |
| void initialize |
( |
const Eigen::MatrixBase< DerivedQ > & |
q, |
|
|
const Eigen::MatrixBase< DerivedV > & |
v |
|
) |
| |
|
inline |
| void setInertiasCached |
( |
| ) |
|
|
inline |
| void setJdotVCached |
( |
bool |
jdotV_cached | ) |
|
|
inline |
| void setPositionKinematicsCached |
( |
| ) |
|
|
inline |
| Eigen::Matrix<typename Derived::Scalar, Derived::RowsAtCompileTime, Eigen::Dynamic> transformPositionDotMappingToVelocityMapping |
( |
const Eigen::MatrixBase< Derived > & |
mat | ) |
const |
|
inline |
| Eigen::Matrix<typename Derived::Scalar, Derived::RowsAtCompileTime, Eigen::Dynamic> transformVelocityMappingToPositionDotMapping |
( |
const Eigen::MatrixBase< Derived > & |
mat | ) |
const |
|
inline |
The documentation for this class was generated from the following file:









 1.8.11
1.8.11 
