|
Drake
|
|
Drake
|
#include <drake/systems/plants/RigidBodyTree.h>
Public Member Functions | |
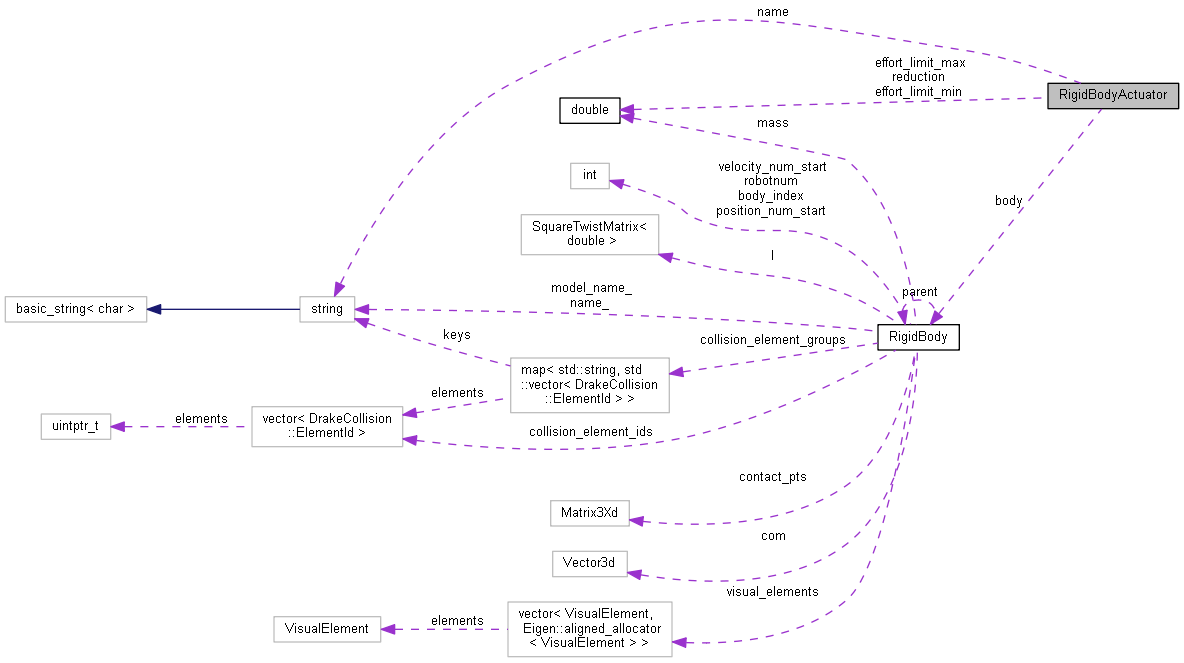
| RigidBodyActuator (const std::string &name, const RigidBody *body, double reduction=1.0, double effort_limit_min=-std::numeric_limits< double >::infinity(), double effort_limit_max=std::numeric_limits< double >::infinity()) | |
Public Attributes | |
| const std::string | name |
| const RigidBody *const | body |
| const double | reduction |
| const double | effort_limit_min |
| const double | effort_limit_max |
|
inline |
| const RigidBody* const body |
| const double effort_limit_max |
| const double effort_limit_min |
| const std::string name |
| const double reduction |
 1.8.11
1.8.11 
