|
Drake
|
|
Drake
|
#include <drake/systems/plants/joints/DrakeJoint.h>
Public Types | |
| enum | FloatingBaseType { FIXED = 0, ROLLPITCHYAW = 1, QUATERNION = 2 } |
| typedef Eigen::AutoDiffScalar< Eigen::Matrix< double, Eigen::Dynamic, 1, 0, 73, 1 > > | AutoDiffFixedMaxSize |
Public Member Functions | |
| DrakeJoint (const std::string &name, const Eigen::Isometry3d &transform_to_parent_body, int num_positions, int num_velocities) | |
| virtual | ~DrakeJoint () |
| const Eigen::Isometry3d & | getTransformToParentBody () const |
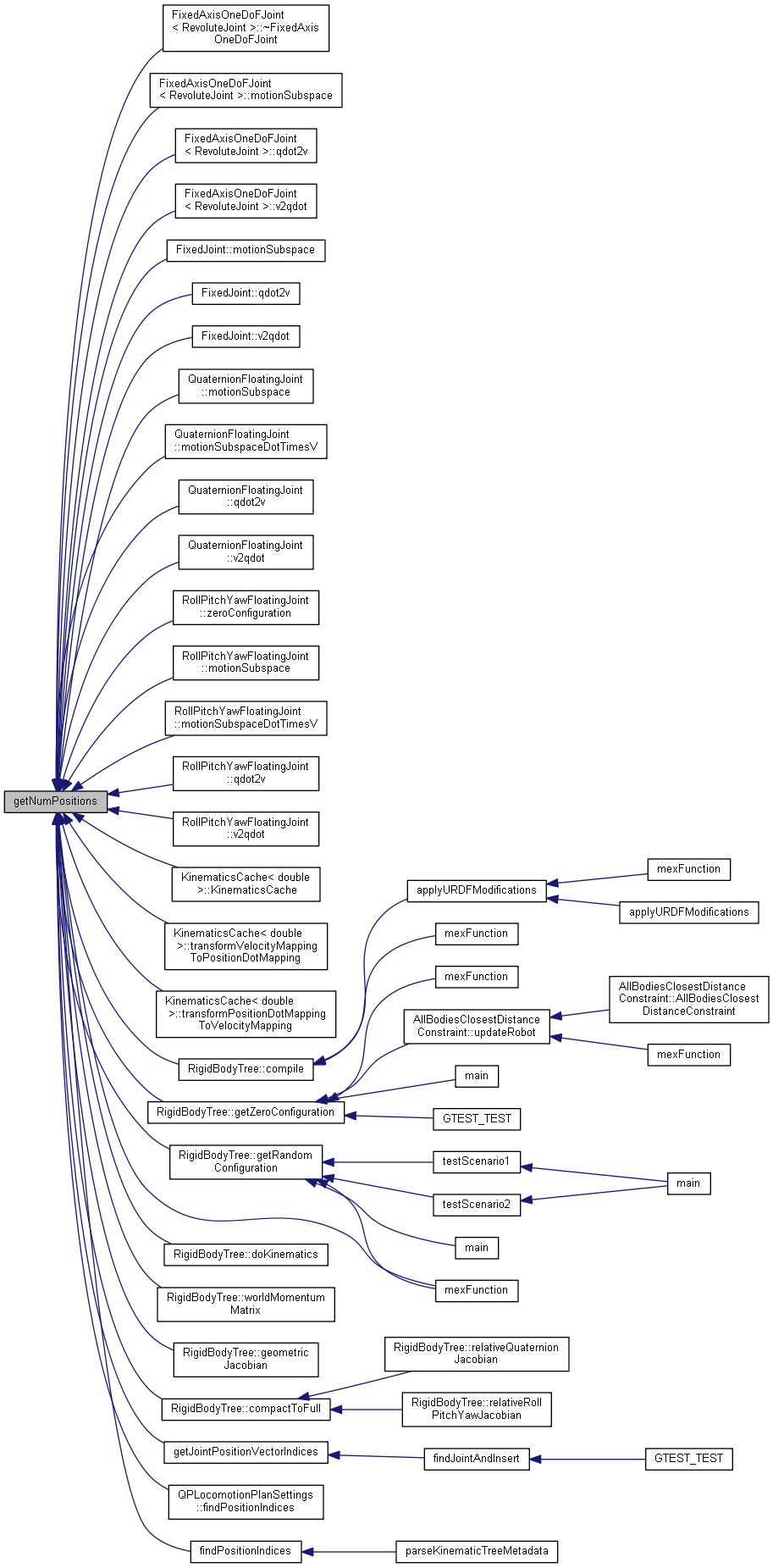
| int | getNumPositions () const |
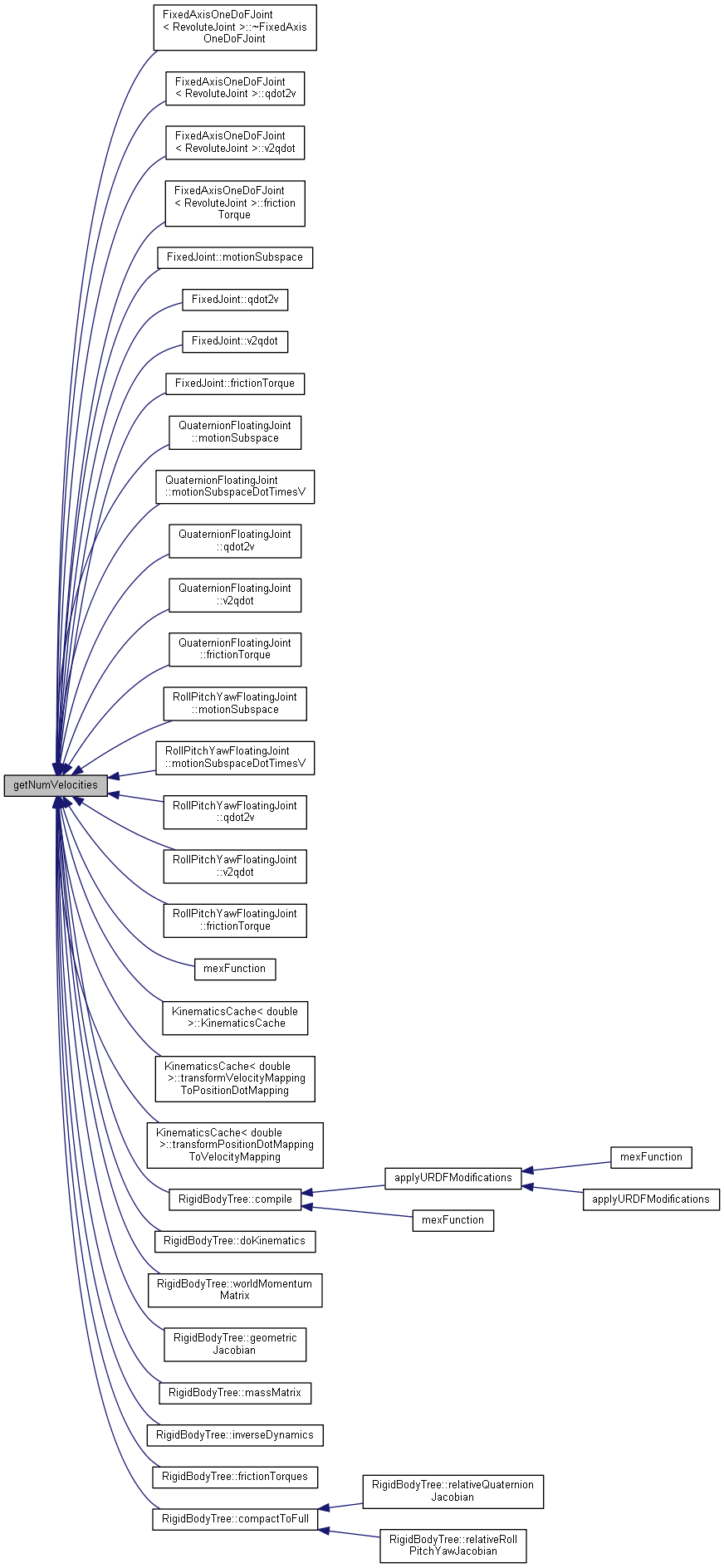
| int | getNumVelocities () const |
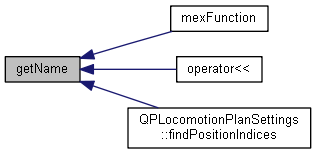
| const std::string & | getName () const |
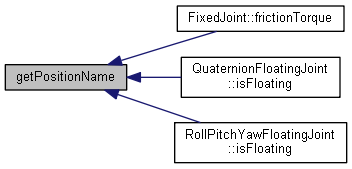
| virtual std::string | getPositionName (int index) const =0 |
| virtual std::string | getVelocityName (int index) const |
| virtual bool | isFloating () const |
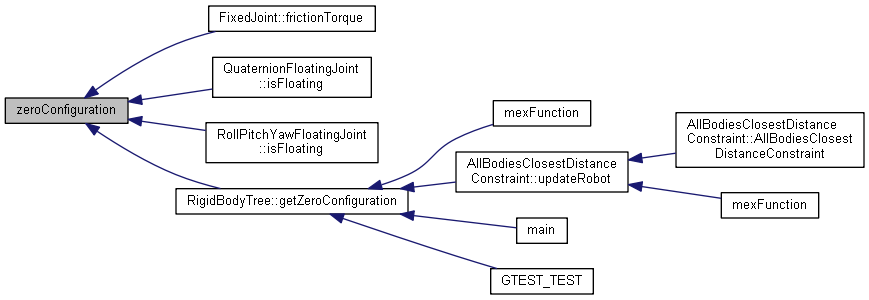
| virtual Eigen::VectorXd | zeroConfiguration () const =0 |
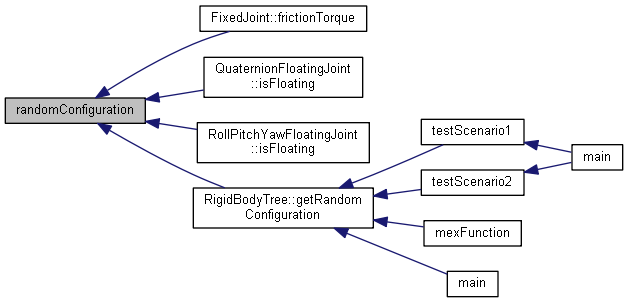
| virtual Eigen::VectorXd | randomConfiguration (std::default_random_engine &generator) const =0 |
| virtual const Eigen::VectorXd & | getJointLimitMin () const |
| virtual const Eigen::VectorXd & | getJointLimitMax () const |
Public Attributes | |
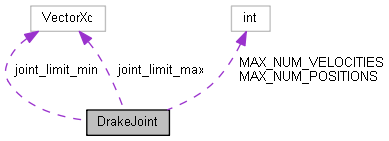
| POSITION_AND_VELOCITY_DEPENDENT_METHODS(Eigen::AutoDiffScalar< Eigen::VectorXd >) EIGEN_MAKE_ALIGNED_OPERATOR_NEW protected Eigen::VectorXd | joint_limit_min |
| Eigen::VectorXd | joint_limit_max |
Static Public Attributes | |
| static const int | MAX_NUM_POSITIONS = 7 |
| static const int | MAX_NUM_VELOCITIES = 6 |
| typedef Eigen::AutoDiffScalar< Eigen::Matrix<double, Eigen::Dynamic, 1, 0, 73, 1> > AutoDiffFixedMaxSize |
| enum FloatingBaseType |
| DrakeJoint | ( | const std::string & | name, |
| const Eigen::Isometry3d & | transform_to_parent_body, | ||
| int | num_positions, | ||
| int | num_velocities | ||
| ) |
|
virtual |
|
virtual |

|
virtual |

| const std::string & getName | ( | ) | const |
| int getNumPositions | ( | ) | const |
| int getNumVelocities | ( | ) | const |
|
pure virtual |
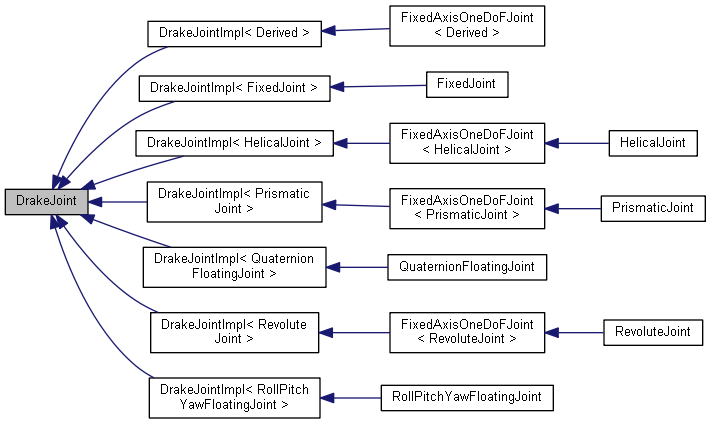
Implemented in RollPitchYawFloatingJoint, FixedAxisOneDoFJoint< Derived >, FixedAxisOneDoFJoint< PrismaticJoint >, FixedAxisOneDoFJoint< HelicalJoint >, FixedAxisOneDoFJoint< RevoluteJoint >, QuaternionFloatingJoint, and FixedJoint.
| const Isometry3d & getTransformToParentBody | ( | ) | const |

|
inlinevirtual |
|
inlinevirtual |
Reimplemented in RollPitchYawFloatingJoint, and QuaternionFloatingJoint.
|
pure virtual |
Implemented in RollPitchYawFloatingJoint, QuaternionFloatingJoint, FixedAxisOneDoFJoint< Derived >, FixedAxisOneDoFJoint< PrismaticJoint >, FixedAxisOneDoFJoint< HelicalJoint >, FixedAxisOneDoFJoint< RevoluteJoint >, and FixedJoint.
|
pure virtual |
Implemented in RollPitchYawFloatingJoint, QuaternionFloatingJoint, FixedAxisOneDoFJoint< Derived >, FixedAxisOneDoFJoint< PrismaticJoint >, FixedAxisOneDoFJoint< HelicalJoint >, FixedAxisOneDoFJoint< RevoluteJoint >, and FixedJoint.
| Eigen::VectorXd joint_limit_max |
| POSITION_AND_VELOCITY_DEPENDENT_METHODS ( Eigen::AutoDiffScalar<Eigen::VectorXd>) EIGEN_MAKE_ALIGNED_OPERATOR_NEW protected Eigen::VectorXd joint_limit_min |
|
static |
|
static |
 1.8.11
1.8.11 

