|
| DRAKEGEOMETRYUTIL_EXPORT double | angleDiff (double phi1, double phi2) |
| |
| DRAKEGEOMETRYUTIL_EXPORT Eigen::Vector4d | uniformlyRandomAxisAngle (std::default_random_engine &generator) |
| |
| DRAKEGEOMETRYUTIL_EXPORT Eigen::Vector4d | uniformlyRandomQuat (std::default_random_engine &generator) |
| |
| DRAKEGEOMETRYUTIL_EXPORT Eigen::Matrix3d | uniformlyRandomRotmat (std::default_random_engine &generator) |
| |
| DRAKEGEOMETRYUTIL_EXPORT Eigen::Vector3d | uniformlyRandomRPY (std::default_random_engine &generator) |
| |
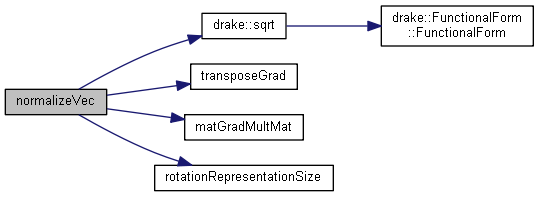
| template<typename Derived > |
| void | normalizeVec (const Eigen::MatrixBase< Derived > &x, typename Derived::PlainObject &x_norm, typename drake::math::Gradient< Derived, Derived::RowsAtCompileTime, 1 >::type *dx_norm=nullptr, typename drake::math::Gradient< Derived, Derived::RowsAtCompileTime, 2 >::type *ddx_norm=nullptr) |
| |
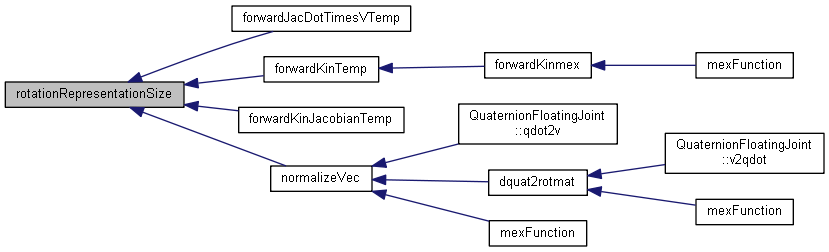
| DRAKEGEOMETRYUTIL_EXPORT int | rotationRepresentationSize (int rotation_type) |
| |
| template<typename Derived > |
| drake::math::Gradient< Eigen::Matrix< typename Derived::Scalar, 3, 3 >, drake::kQuaternionSize >::type | dquat2rotmat (const Eigen::MatrixBase< Derived > &q) |
| |
| template<typename DerivedR , typename DerivedDR > |
| drake::math::Gradient< Eigen::Matrix< typename DerivedR::Scalar, drake::kRpySize, 1 >, DerivedDR::ColsAtCompileTime >::type | drotmat2rpy (const Eigen::MatrixBase< DerivedR > &R, const Eigen::MatrixBase< DerivedDR > &dR) |
| |
| template<typename DerivedR , typename DerivedDR > |
| drake::math::Gradient< Eigen::Matrix< typename DerivedR::Scalar, drake::kQuaternionSize, 1 >, DerivedDR::ColsAtCompileTime >::type | drotmat2quat (const Eigen::MatrixBase< DerivedR > &R, const Eigen::MatrixBase< DerivedDR > &dR) |
| |
| template<typename Derived > |
| Eigen::Matrix< typename Derived::Scalar, 3, 3 > | vectorToSkewSymmetric (const Eigen::MatrixBase< Derived > &p) |
| |
| template<typename DerivedA , typename DerivedB > |
| Eigen::Matrix< typename DerivedA::Scalar, 3, Eigen::Dynamic > | dcrossProduct (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedB > &b, const typename drake::math::Gradient< DerivedA, Eigen::Dynamic >::type &da, const typename drake::math::Gradient< DerivedB, Eigen::Dynamic >::type &db) |
| |
| template<typename DerivedQ , typename DerivedM , typename DerivedDM > |
| void | angularvel2quatdotMatrix (const Eigen::MatrixBase< DerivedQ > &q, Eigen::MatrixBase< DerivedM > &M, Eigen::MatrixBase< DerivedDM > *dM=nullptr) |
| |
| template<typename DerivedRPY , typename DerivedPhi , typename DerivedDPhi , typename DerivedDDPhi > |
| void | angularvel2rpydotMatrix (const Eigen::MatrixBase< DerivedRPY > &rpy, typename Eigen::MatrixBase< DerivedPhi > &phi, typename Eigen::MatrixBase< DerivedDPhi > *dphi=nullptr, typename Eigen::MatrixBase< DerivedDDPhi > *ddphi=nullptr) |
| |
| template<typename DerivedRPY , typename DerivedE > |
| void | rpydot2angularvelMatrix (const Eigen::MatrixBase< DerivedRPY > &rpy, Eigen::MatrixBase< DerivedE > &E, typename drake::math::Gradient< DerivedE, drake::kRpySize, 1 >::type *dE=nullptr) |
| |
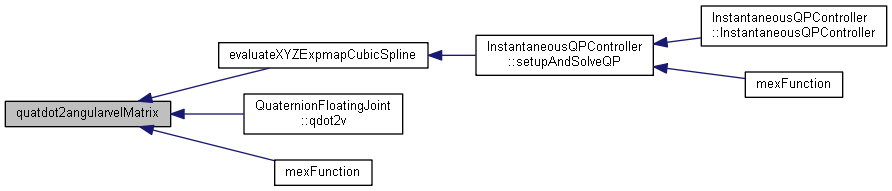
| template<typename Derived > |
| Eigen::Matrix< typename Derived::Scalar, 3, 4 > | quatdot2angularvelMatrix (const Eigen::MatrixBase< Derived > &q) |
| |
| template<typename DerivedRPY , typename DerivedRPYdot , typename DerivedOMEGA > |
| void | rpydot2angularvel (const Eigen::MatrixBase< DerivedRPY > &rpy, const Eigen::MatrixBase< DerivedRPYdot > &rpydot, Eigen::MatrixBase< DerivedOMEGA > &omega, typename drake::math::Gradient< DerivedOMEGA, drake::kRpySize, 1 >::type *domega=nullptr) |
| |
| template<typename DerivedM > |
| TransformSpatial< DerivedM >::type | transformSpatialMotion (const Eigen::Transform< typename DerivedM::Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedM > &M) |
| |
| template<typename Scalar , typename DerivedX , typename DerivedDT , typename DerivedDX > |
| drake::math::Gradient< DerivedX, DerivedDX::ColsAtCompileTime, 1 >::type | dTransformSpatialMotion (const Eigen::Transform< Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedX > &X, const Eigen::MatrixBase< DerivedDT > &dT, const Eigen::MatrixBase< DerivedDX > &dX) |
| |
| template<typename DerivedF > |
| TransformSpatial< DerivedF >::type | transformSpatialForce (const Eigen::Transform< typename DerivedF::Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedF > &F) |
| |
| template<typename Scalar , typename DerivedX , typename DerivedDT , typename DerivedDX > |
| drake::math::Gradient< DerivedX, DerivedDX::ColsAtCompileTime >::type | dTransformSpatialForce (const Eigen::Transform< Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedX > &X, const Eigen::MatrixBase< DerivedDT > &dT, const Eigen::MatrixBase< DerivedDX > &dX) |
| |
| template<typename DerivedI > |
| bool | isRegularInertiaMatrix (const Eigen::MatrixBase< DerivedI > &I) |
| |
| template<typename DerivedI > |
| drake::SquareTwistMatrix< typename DerivedI::Scalar > | transformSpatialInertia (const Eigen::Transform< typename DerivedI::Scalar, drake::kSpaceDimension, Eigen::Isometry > &T_current_to_new, const Eigen::MatrixBase< DerivedI > &I) |
| |
| template<typename DerivedA , typename DerivedB > |
| TransformSpatial< DerivedB >::type | crossSpatialMotion (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedB > &b) |
| |
| template<typename DerivedA , typename DerivedB > |
| TransformSpatial< DerivedB >::type | crossSpatialForce (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedB > &b) |
| |
| template<typename DerivedA , typename DerivedB > |
| drake::TwistMatrix< typename DerivedA::Scalar > | dCrossSpatialMotion (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedB > &b, const typename drake::math::Gradient< DerivedA, Eigen::Dynamic >::type &da, const typename drake::math::Gradient< DerivedB, Eigen::Dynamic >::type &db) |
| |
| template<typename DerivedA , typename DerivedB > |
| drake::TwistMatrix< typename DerivedA::Scalar > | dCrossSpatialForce (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedB > &b, const typename drake::math::Gradient< DerivedA, Eigen::Dynamic >::type &da, const typename drake::math::Gradient< DerivedB, Eigen::Dynamic >::type &db) |
| |
| template<typename DerivedS , typename DerivedQdotToV > |
| DHomogTrans< DerivedQdotToV >::type | dHomogTrans (const Eigen::Transform< typename DerivedQdotToV::Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedS > &S, const Eigen::MatrixBase< DerivedQdotToV > &qdot_to_v) |
| |
| template<typename DerivedDT > |
| DHomogTrans< DerivedDT >::type | dHomogTransInv (const Eigen::Transform< typename DerivedDT::Scalar, 3, Eigen::Isometry > &T, const Eigen::MatrixBase< DerivedDT > &dT) |
| |
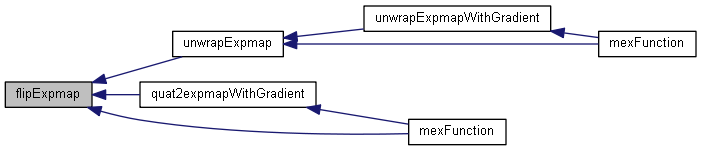
| template<typename Derived > |
| Eigen::Matrix< typename Derived::Scalar, 3, 1 > | flipExpmap (const Eigen::MatrixBase< Derived > &expmap) |
| |
| template<typename Derived1 , typename Derived2 > |
| Eigen::Matrix< typename Derived1::Scalar, 3, 1 > | unwrapExpmap (const Eigen::MatrixBase< Derived1 > &expmap1, const Eigen::MatrixBase< Derived2 > &expmap2) |
| |
THIS FILE IS DEPRECATED.
Its contents are moving into drake/math.
























 1.8.11
1.8.11 
