|
Drake
|
|
Drake
|
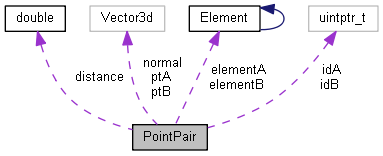
Structure containing the results of a collision query. More...
#include <drake/systems/plants/collision/point_pair.h>
Public Member Functions | |
| PointPair () | |
| PointPair (const Element *elementA, const Element *elementB, const Eigen::Vector3d &ptA, const Eigen::Vector3d &ptB, const Eigen::Vector3d &normal, double distance) | |
Public Attributes | |
| const Element * | elementA {nullptr} |
| Element A in the pair participating in the collision. More... | |
| const Element * | elementB {nullptr} |
| Element B in the pair participating in the collision. More... | |
| ElementId | idA {0} |
| Id of element A participating in the collision. More... | |
| ElementId | idB {0} |
| Id of element B participating in the collision. More... | |
| Eigen::Vector3d | ptA |
| Collision point on the surface of body A. More... | |
| Eigen::Vector3d | ptB |
| Collision point on the surface of body B. More... | |
| Eigen::Vector3d | normal |
| Outwards normal on body B. More... | |
| double | distance {} |
| Distance between the point on body A and the point on body B. More... | |
Structure containing the results of a collision query.
|
inline |
|
inline |
| double distance {} |
Distance between the point on body A and the point on body B.
| ElementId idA {0} |
Id of element A participating in the collision.
| ElementId idB {0} |
Id of element B participating in the collision.
| Eigen::Vector3d normal |
Outwards normal on body B.
On body A it points in the opposite direction.
| Eigen::Vector3d ptA |
Collision point on the surface of body A.
| Eigen::Vector3d ptB |
Collision point on the surface of body B.
 1.8.11
1.8.11 
