#include <drake/systems/controllers/InstantaneousQPController.h>
|
| | InstantaneousQPController (std::unique_ptr< RigidBodyTree > robot_in, const std::map< std::string, QPControllerParams > ¶m_sets_in, const RobotPropertyCache &rpc_in) |
| |
| | InstantaneousQPController (std::unique_ptr< RigidBodyTree > robot_in, const std::string &control_config_filename) |
| |
| | InstantaneousQPController (const std::string &urdf_filename, const std::string &control_config_filename) |
| |
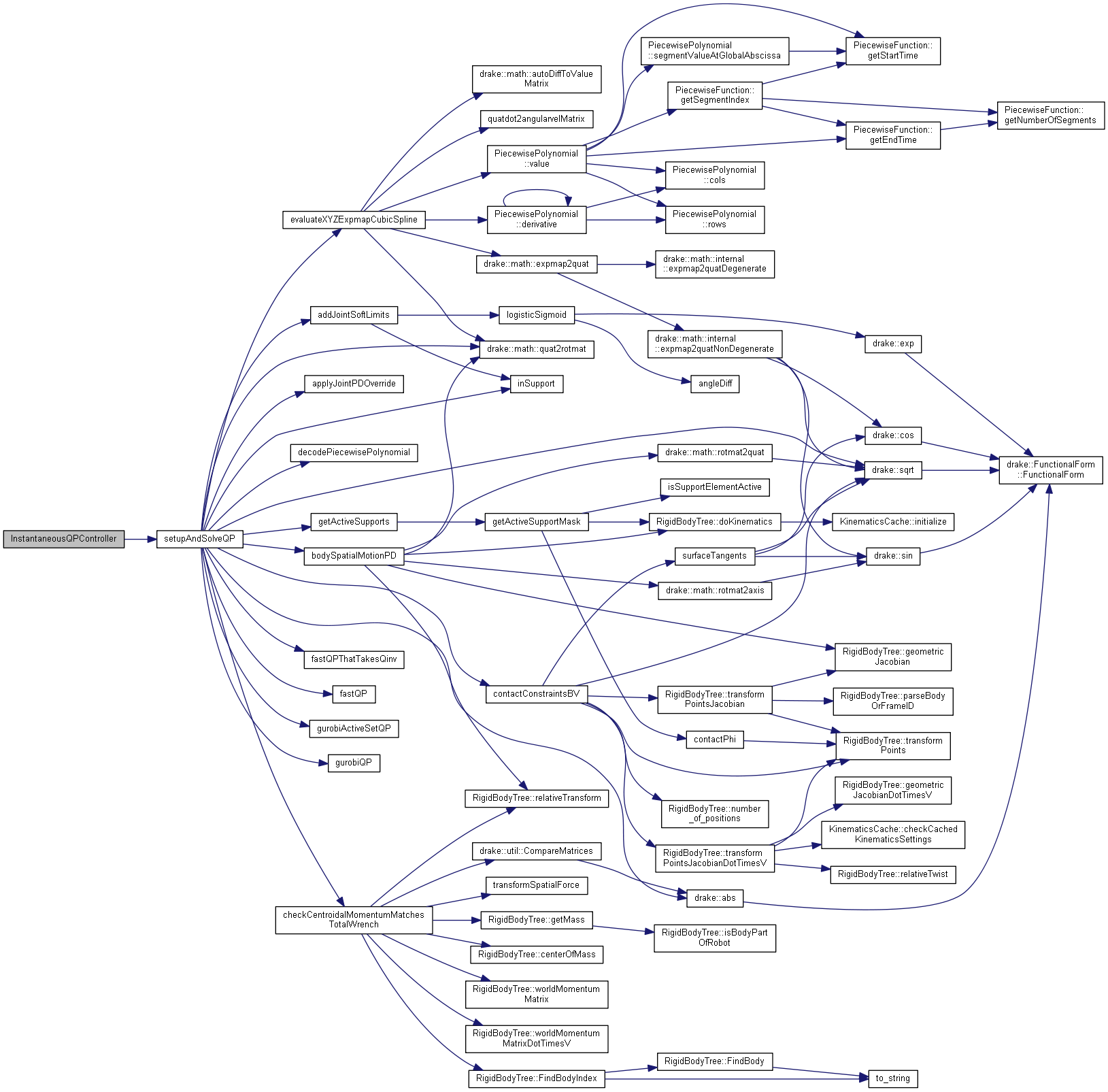
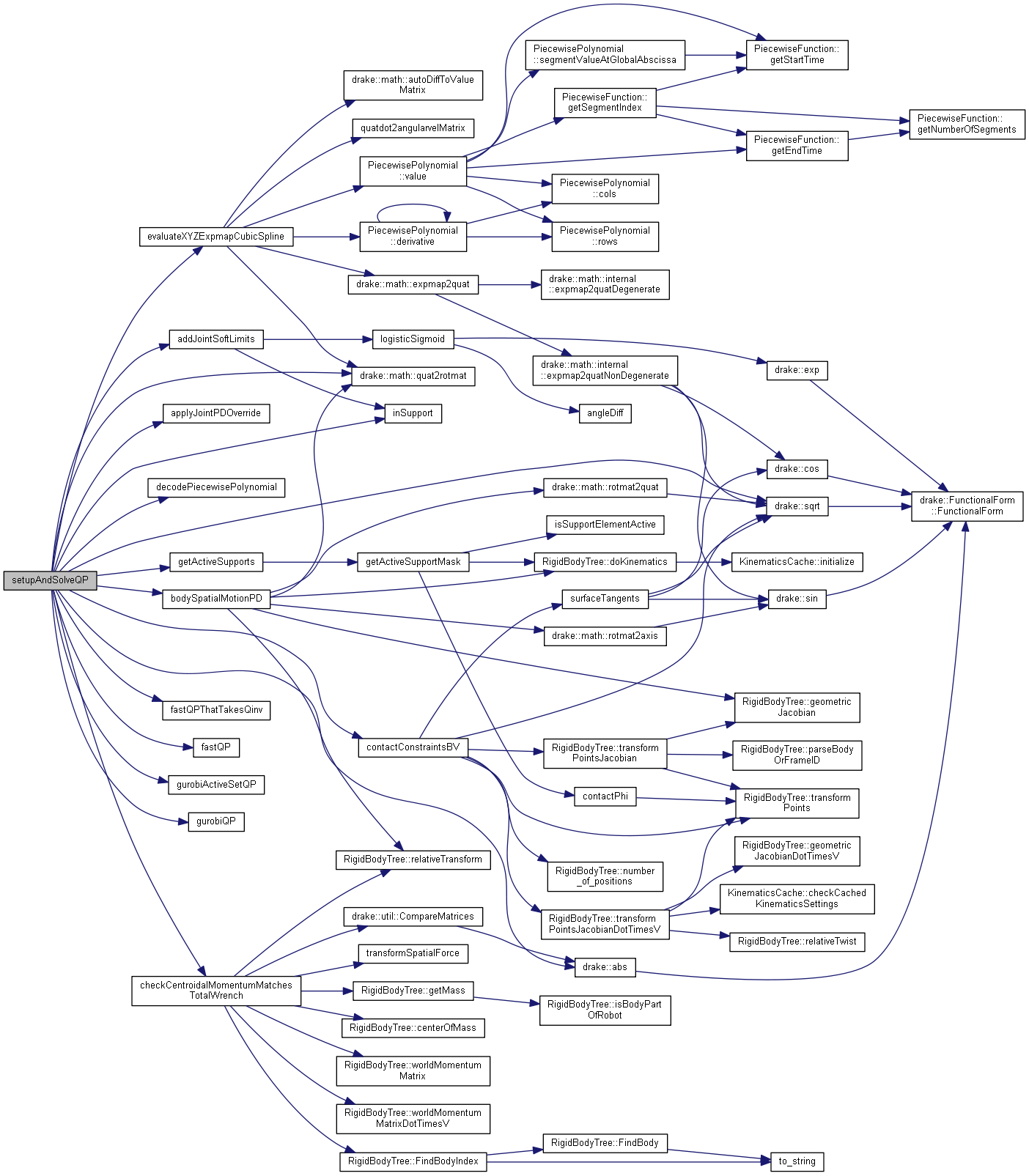
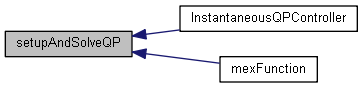
| int | setupAndSolveQP (const drake::lcmt_qp_controller_input &qp_input, const DrakeRobotState &robot_state, const Eigen::Ref< const Eigen::Matrix< bool, Eigen::Dynamic, 1 >> &contact_detected, const std::map< Side, ForceTorqueMeasurement > &foot_force_torque_measurements, QPControllerOutput &qp_output, QPControllerDebugData *debug=NULL) |
| |
| const RigidBodyTree & | getRobot () const |
| |
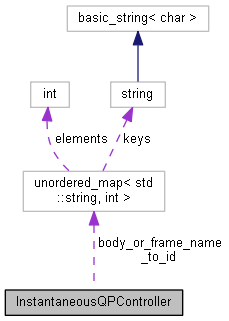
| std::unordered_map<std::string, int> body_or_frame_name_to_id |
The documentation for this class was generated from the following files:

 1.8.11
1.8.11 
