|
Drake
|
|
Drake
|
#include <drake/systems/controllers/QPCommon.h>
Public Member Functions | |
| QPControllerParams (const RigidBodyTree &robot) | |
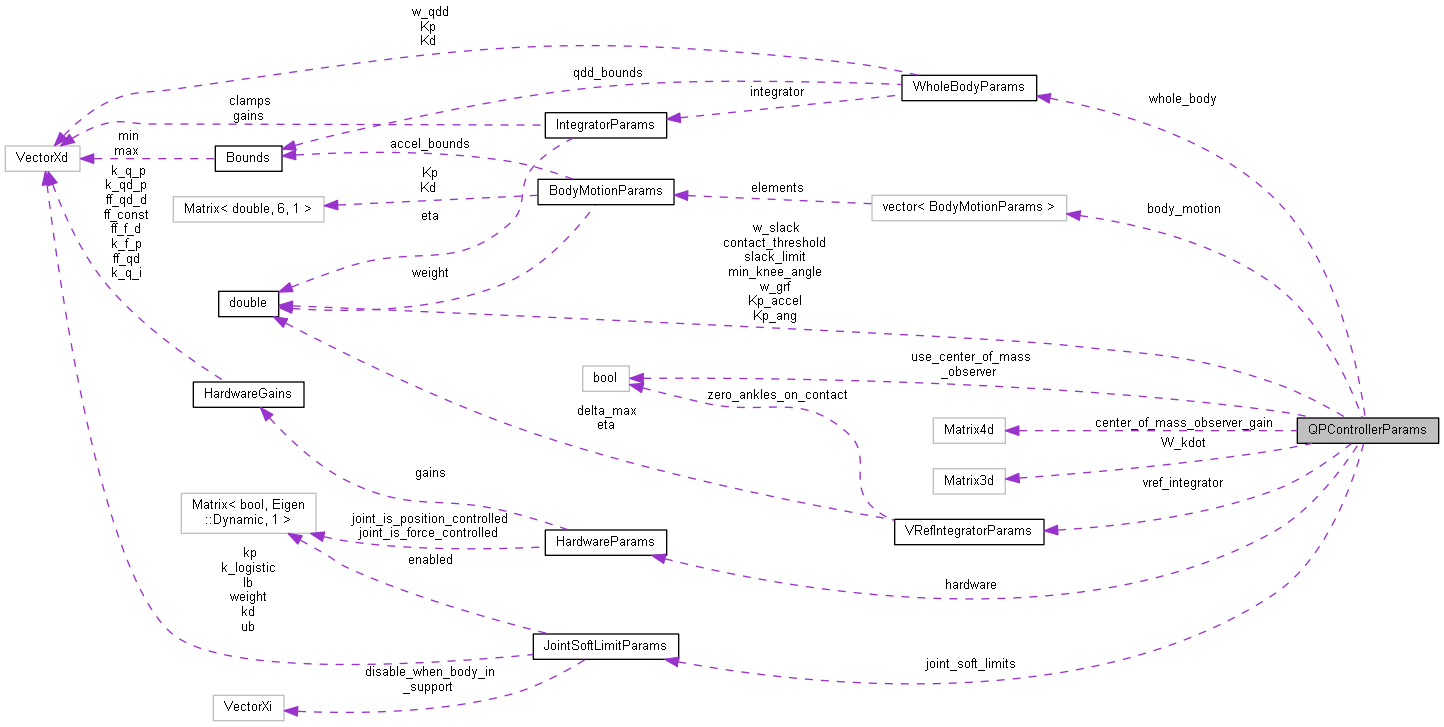
Public Attributes | |
| WholeBodyParams | whole_body |
| std::vector< BodyMotionParams > | body_motion |
| VRefIntegratorParams | vref_integrator |
| JointSoftLimitParams | joint_soft_limits |
| HardwareParams | hardware |
| Eigen::Matrix3d | W_kdot |
| double | Kp_ang |
| double | w_slack |
| double | slack_limit |
| double | w_grf |
| double | Kp_accel |
| double | contact_threshold |
| double | min_knee_angle |
| bool | use_center_of_mass_observer |
| Eigen::Matrix4d | center_of_mass_observer_gain |
Friends | |
| bool | operator== (const QPControllerParams &lhs, const QPControllerParams &rhs) |
|
inlineexplicit |
|
friend |
| std::vector<BodyMotionParams> body_motion |
| Eigen::Matrix4d center_of_mass_observer_gain |
| double contact_threshold |
| HardwareParams hardware |
| JointSoftLimitParams joint_soft_limits |
| double Kp_accel |
| double Kp_ang |
| double min_knee_angle |
| double slack_limit |
| bool use_center_of_mass_observer |
| VRefIntegratorParams vref_integrator |
| double w_grf |
| Eigen::Matrix3d W_kdot |
| double w_slack |
| WholeBodyParams whole_body |
 1.8.11
1.8.11 
