|
Drake
|
|
Drake
|
#include <drake/systems/controllers/QPCommon.h>
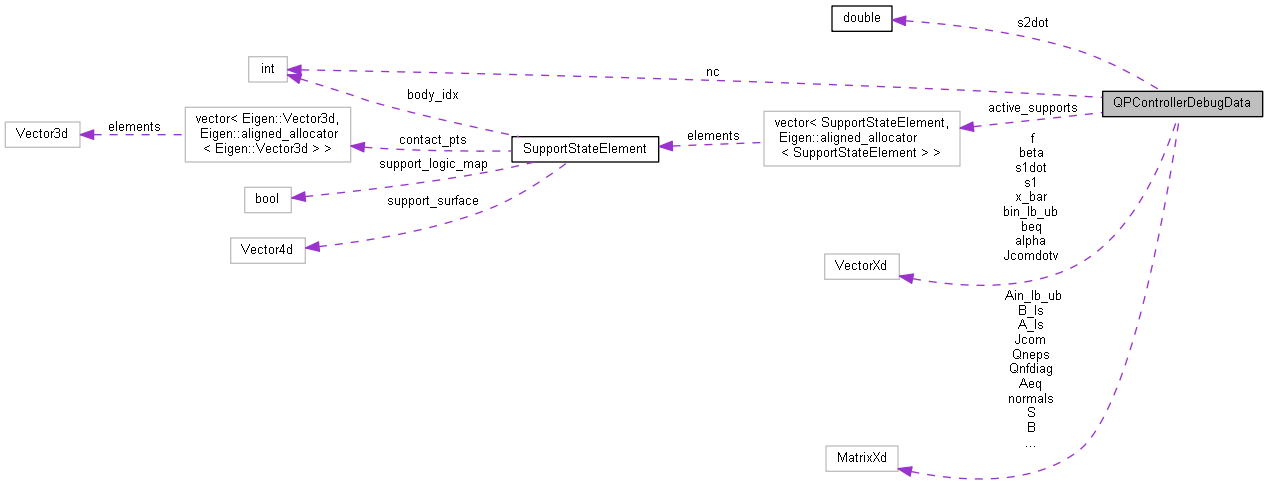
Public Attributes | |
| std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement > > | active_supports |
| int | nc |
| Eigen::MatrixXd | normals |
| Eigen::MatrixXd | B |
| Eigen::VectorXd | alpha |
| Eigen::VectorXd | f |
| Eigen::MatrixXd | Aeq |
| Eigen::VectorXd | beq |
| Eigen::MatrixXd | Ain_lb_ub |
| Eigen::VectorXd | bin_lb_ub |
| Eigen::MatrixXd | Qnfdiag |
| Eigen::MatrixXd | Qneps |
| Eigen::VectorXd | x_bar |
| Eigen::MatrixXd | S |
| Eigen::VectorXd | s1 |
| Eigen::VectorXd | s1dot |
| double | s2dot |
| Eigen::MatrixXd | A_ls |
| Eigen::MatrixXd | B_ls |
| Eigen::MatrixXd | Jcom |
| Eigen::VectorXd | Jcomdotv |
| Eigen::VectorXd | beta |
| Eigen::MatrixXd A_ls |
| std::vector<SupportStateElement, Eigen::aligned_allocator<SupportStateElement> > active_supports |
| Eigen::MatrixXd Aeq |
| Eigen::MatrixXd Ain_lb_ub |
| Eigen::VectorXd alpha |
| Eigen::MatrixXd B |
| Eigen::MatrixXd B_ls |
| Eigen::VectorXd beq |
| Eigen::VectorXd beta |
| Eigen::VectorXd bin_lb_ub |
| Eigen::VectorXd f |
| Eigen::MatrixXd Jcom |
| Eigen::VectorXd Jcomdotv |
| int nc |
| Eigen::MatrixXd normals |
| Eigen::MatrixXd Qneps |
| Eigen::MatrixXd Qnfdiag |
| Eigen::MatrixXd S |
| Eigen::VectorXd s1 |
| Eigen::VectorXd s1dot |
| double s2dot |
| Eigen::VectorXd x_bar |
 1.8.11
1.8.11 
