|
Drake
|
|
Drake
|
#include "drake/systems/plants/rigidBodyTreeMexFunctions.h"#include <typeinfo>#include <Eigen/Sparse>#include "drake/common/drake_assert.h"#include "drake/common/eigen_types.h"#include "drake/systems/plants/RigidBodyTree.h"#include "drake/systems/plants/rigidBodyTreeMexConversions.h"#include "drake/util/makeFunction.h"#include "drake/util/standardMexConversions.h"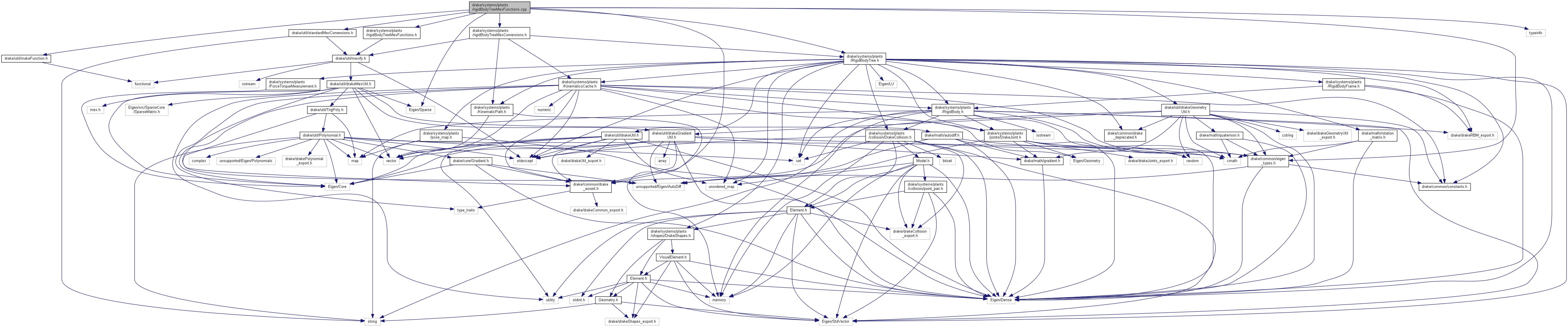
Typedefs | |
| typedef AutoDiffScalar< VectorXd > | AutoDiffDynamicSize |
| typedef DrakeJoint::AutoDiffFixedMaxSize | AutoDiffFixedMaxSize |
Functions | |
| void | centerOfMassJacobianDotTimesVmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| Mex function implementations. More... | |
| void | centerOfMassmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | centerOfMassJacobianmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | centroidalMomentumMatrixDotTimesvmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | centroidalMomentumMatrixmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename DerivedQ , typename DerivedV > | |
| void | doKinematicsTemp (const RigidBodyTree &model, KinematicsCache< typename DerivedQ::Scalar > &cache, const MatrixBase< DerivedQ > &q, const MatrixBase< DerivedV > &v, bool compute_JdotV) |
| void | doKinematicsmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
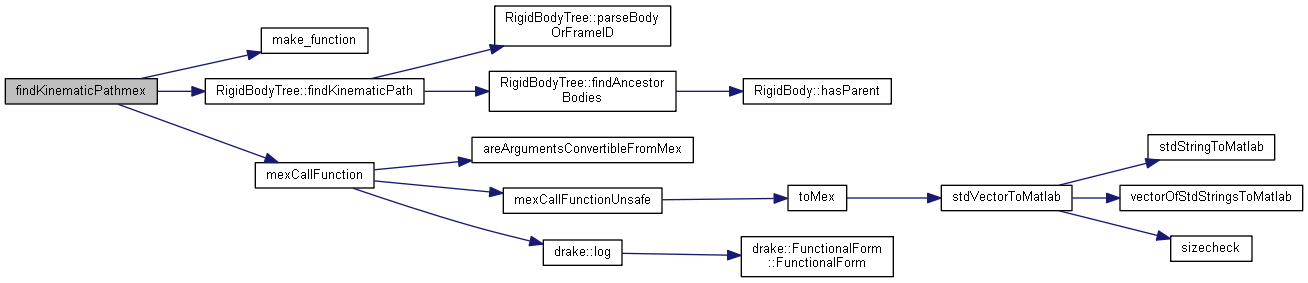
| void | findKinematicPathmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar , typename DerivedPoints > | |
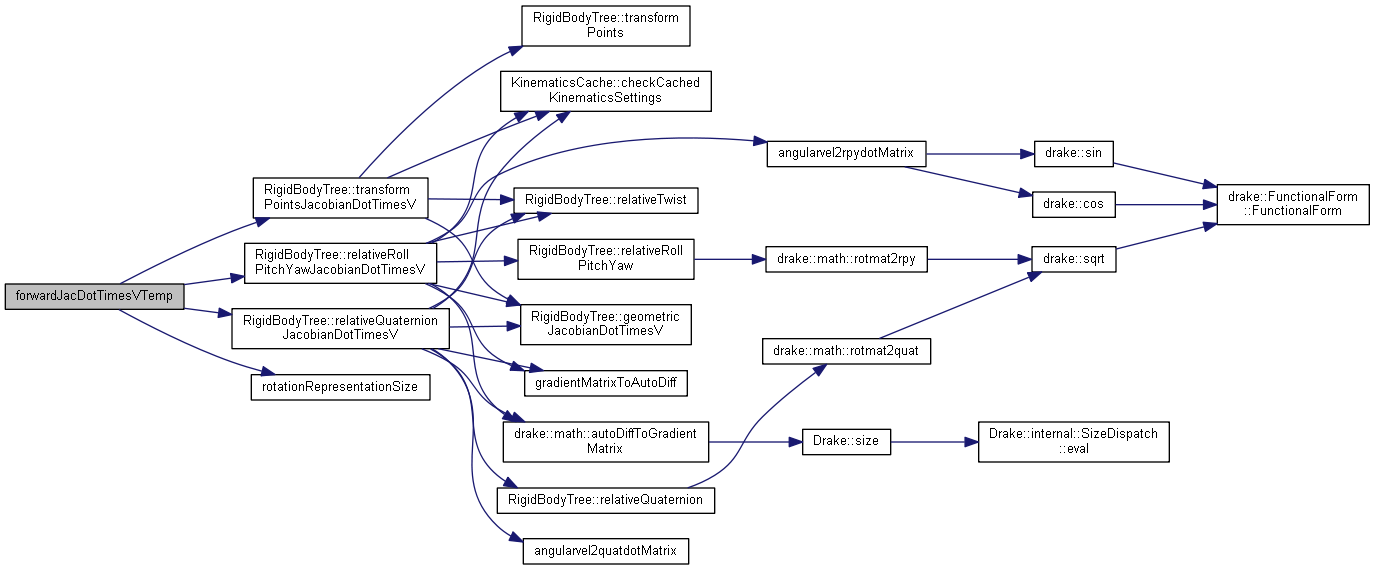
| Matrix< Scalar, Dynamic, DerivedPoints::ColsAtCompileTime > | forwardJacDotTimesVTemp (const RigidBodyTree &tree, const KinematicsCache< Scalar > &cache, const MatrixBase< DerivedPoints > &points, int current_body_or_frame_ind, int new_body_or_frame_ind, int rotation_type) |
| void | forwardJacDotTimesVmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar , typename DerivedPoints > | |
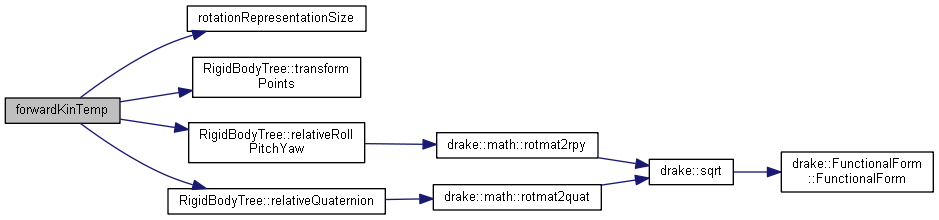
| Matrix< Scalar, Dynamic, DerivedPoints::ColsAtCompileTime > | forwardKinTemp (const RigidBodyTree &tree, const KinematicsCache< Scalar > &cache, const MatrixBase< DerivedPoints > &points, int current_body_or_frame_ind, int new_body_or_frame_ind, int rotation_type) |
| void | forwardKinmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar , typename DerivedPoints > | |
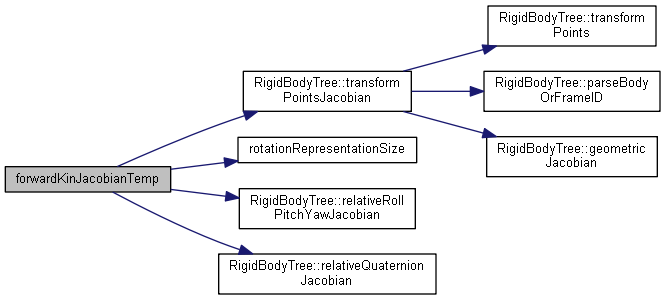
| Matrix< Scalar, Dynamic, Dynamic > | forwardKinJacobianTemp (const RigidBodyTree &tree, const KinematicsCache< Scalar > &cache, const MatrixBase< DerivedPoints > &points, int current_body_or_frame_ind, int new_body_or_frame_ind, int rotation_type, bool in_terms_of_qdot) |
| void | forwardKinJacobianmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | forwardKinPositionGradientmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | geometricJacobianDotTimesVmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar > | |
| drake::TwistMatrix< Scalar > | geometricJacobianTemp (const RigidBodyTree &model, const KinematicsCache< Scalar > &cache, int base_body_or_frame_ind, int end_effector_body_or_frame_ind, int expressed_in_body_or_frame_ind, bool in_terms_of_qdot) |
| void | geometricJacobianmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | massMatrixmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar , typename DerivedF > | |
| Matrix< Scalar, Dynamic, 1 > | dynamicsBiasTermTemp (const RigidBodyTree &model, KinematicsCache< Scalar > &cache, const MatrixBase< DerivedF > &f_ext_value) |
| void | dynamicsBiasTermmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| template<typename Scalar > | |
| Matrix< Scalar, Dynamic, Dynamic > | velocityToPositionDotMapping (const KinematicsCache< Scalar > &cache) |
| template<typename Scalar > | |
| Matrix< Scalar, Dynamic, Dynamic > | positionDotToVelocityMapping (const KinematicsCache< Scalar > &cache) |
| void | velocityToPositionDotMappingmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void | positionDotToVelocityMappingmex (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| typedef AutoDiffScalar<VectorXd> AutoDiffDynamicSize |
| void centerOfMassJacobianDotTimesVmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
Mex function implementations.


| void centerOfMassJacobianmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void centerOfMassmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void centroidalMomentumMatrixDotTimesvmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void centroidalMomentumMatrixmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void doKinematicsmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |


| void doKinematicsTemp | ( | const RigidBodyTree & | model, |
| KinematicsCache< typename DerivedQ::Scalar > & | cache, | ||
| const MatrixBase< DerivedQ > & | q, | ||
| const MatrixBase< DerivedV > & | v, | ||
| bool | compute_JdotV | ||
| ) |

| void dynamicsBiasTermmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, 1> dynamicsBiasTermTemp | ( | const RigidBodyTree & | model, |
| KinematicsCache< Scalar > & | cache, | ||
| const MatrixBase< DerivedF > & | f_ext_value | ||
| ) |


| void findKinematicPathmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void forwardJacDotTimesVmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, DerivedPoints::ColsAtCompileTime> forwardJacDotTimesVTemp | ( | const RigidBodyTree & | tree, |
| const KinematicsCache< Scalar > & | cache, | ||
| const MatrixBase< DerivedPoints > & | points, | ||
| int | current_body_or_frame_ind, | ||
| int | new_body_or_frame_ind, | ||
| int | rotation_type | ||
| ) |
| void forwardKinJacobianmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, Dynamic> forwardKinJacobianTemp | ( | const RigidBodyTree & | tree, |
| const KinematicsCache< Scalar > & | cache, | ||
| const MatrixBase< DerivedPoints > & | points, | ||
| int | current_body_or_frame_ind, | ||
| int | new_body_or_frame_ind, | ||
| int | rotation_type, | ||
| bool | in_terms_of_qdot | ||
| ) |
| void forwardKinmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |


| void forwardKinPositionGradientmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, DerivedPoints::ColsAtCompileTime> forwardKinTemp | ( | const RigidBodyTree & | tree, |
| const KinematicsCache< Scalar > & | cache, | ||
| const MatrixBase< DerivedPoints > & | points, | ||
| int | current_body_or_frame_ind, | ||
| int | new_body_or_frame_ind, | ||
| int | rotation_type | ||
| ) |

| void geometricJacobianDotTimesVmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| void geometricJacobianmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| drake::TwistMatrix<Scalar> geometricJacobianTemp | ( | const RigidBodyTree & | model, |
| const KinematicsCache< Scalar > & | cache, | ||
| int | base_body_or_frame_ind, | ||
| int | end_effector_body_or_frame_ind, | ||
| int | expressed_in_body_or_frame_ind, | ||
| bool | in_terms_of_qdot | ||
| ) |

| void massMatrixmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, Dynamic> positionDotToVelocityMapping | ( | const KinematicsCache< Scalar > & | cache | ) |
| void positionDotToVelocityMappingmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

| Matrix<Scalar, Dynamic, Dynamic> velocityToPositionDotMapping | ( | const KinematicsCache< Scalar > & | cache | ) |
| void velocityToPositionDotMappingmex | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |

 1.8.11
1.8.11 
