|
Drake
|
|
Drake
|
#include <iostream>#include <gtest/gtest.h>#include "drake/common/eigen_types.h"#include "drake/math/roll_pitch_yaw.h"#include "drake/Path.h"#include "drake/systems/plants/parser_urdf.h"#include "drake/systems/plants/RigidBodyTree.h"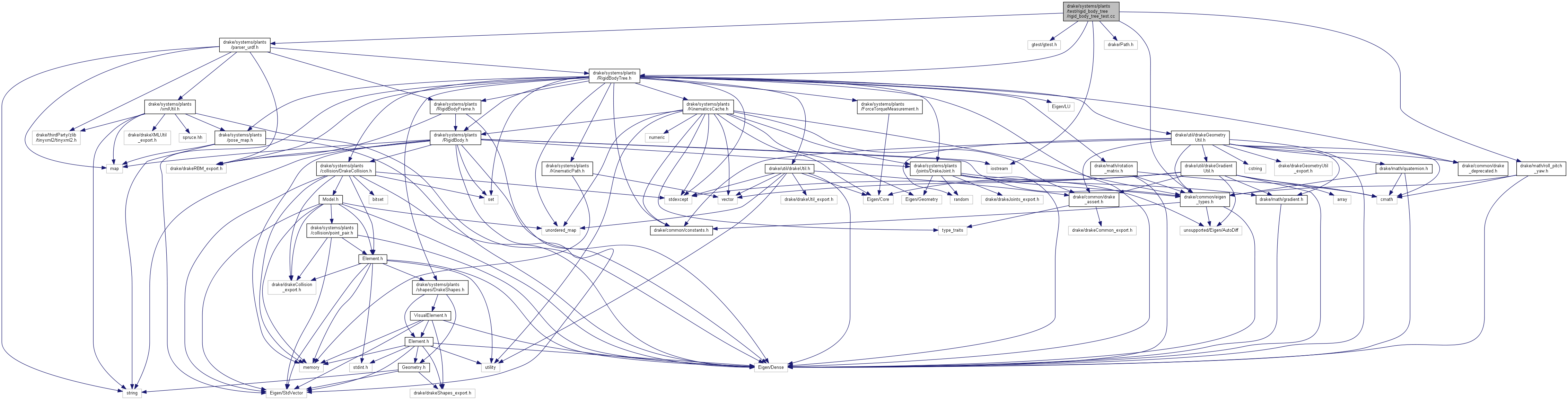
Namespaces | |
| drake | |
| drake::systems | |
| drake::systems::plants | |
| drake::systems::plants::test | |
| RigidBody* r1b1 {} |
| RigidBody* r2b1 {} |
| RigidBody* r3b1 {} |
| RigidBody* r4b1 {} |
| std::unique_ptr<RigidBodyTree> tree |
 1.8.11
1.8.11 
