|
Drake
|
|
Drake
|
#include <Eigen/Sparse>#include "drake/util/mexify.h"#include "drake/systems/plants/RigidBodyTree.h"#include "KinematicsCache.h"#include "drake/util/standardMexConversions.h"#include "rigidBodyTreeMexConversions.h"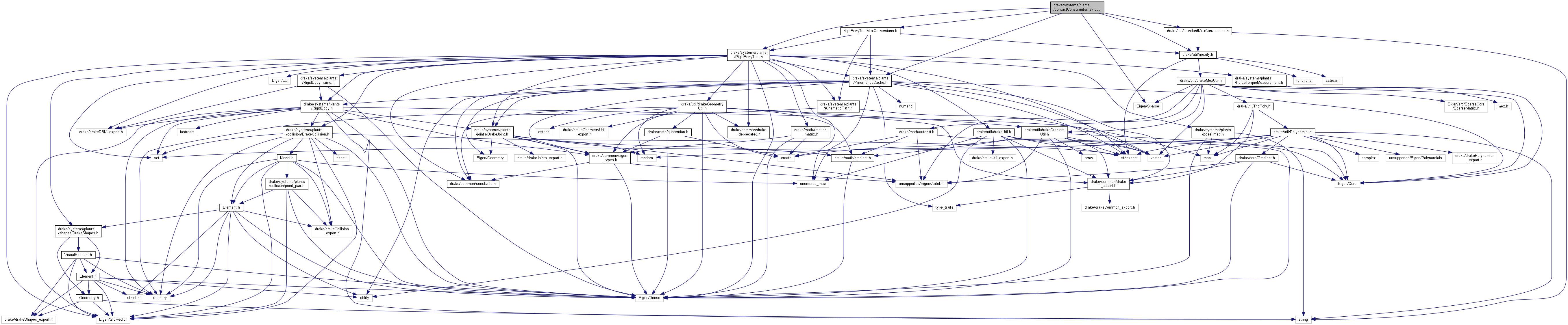
Typedefs | |
| template<typename Scalar > | |
| using | MatrixX = Matrix< Scalar, Dynamic, Dynamic > |
| typedef AutoDiffScalar< VectorXd > | AutoDiffDynamicSize |
| typedef DrakeJoint::AutoDiffFixedMaxSize | AutoDiffFixedMaxSize |
Functions | |
| template<typename... Args, typename ReturnType > | |
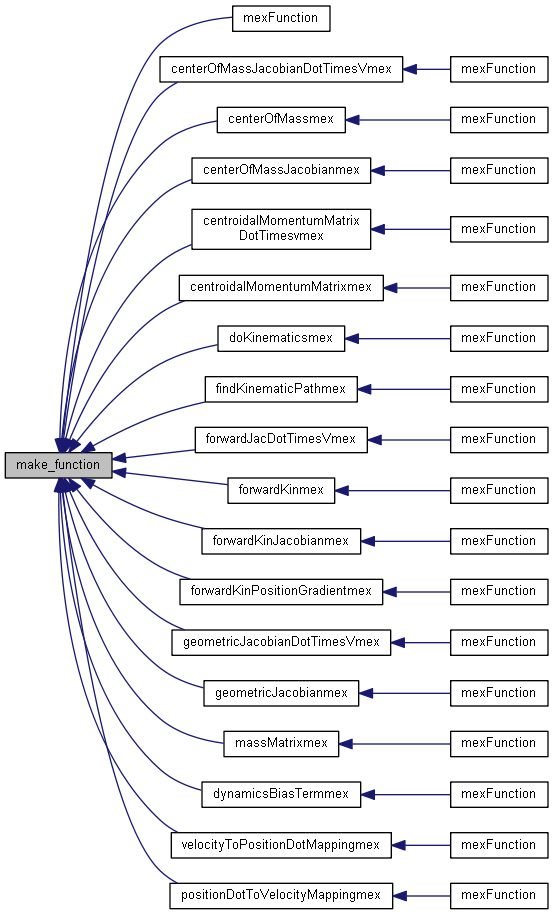
| auto | make_function (ReturnType(*p)(Args...)) -> std::function< ReturnType(Args...)> |
| void | buildSparseMatrixForContactConstraints (Map< const Matrix3Xd > const &pts, SparseMatrix< double > &sparse) |
| template<typename Scalar > | |
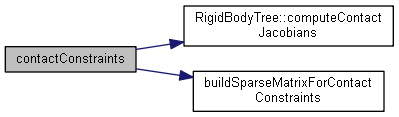
| pair< MatrixX< Scalar >, vector< MatrixX< Scalar > > > | contactConstraints (const RigidBodyTree &model, const KinematicsCache< Scalar > &cache, const Map< const Matrix3Xd > &normals, const Map< const VectorXi > &idxA, const Map< const VectorXi > &idxB, const Map< const Matrix3Xd > &xA, const Map< const Matrix3Xd > &xB, const vector< Map< const Matrix3Xd >> &d) |
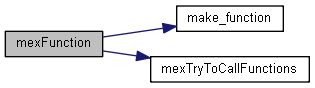
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| typedef AutoDiffScalar<VectorXd> AutoDiffDynamicSize |
| using MatrixX = Matrix<Scalar, Dynamic, Dynamic> |
|
inline |

| pair<MatrixX<Scalar>, vector<MatrixX<Scalar> > > contactConstraints | ( | const RigidBodyTree & | model, |
| const KinematicsCache< Scalar > & | cache, | ||
| const Map< const Matrix3Xd > & | normals, | ||
| const Map< const VectorXi > & | idxA, | ||
| const Map< const VectorXi > & | idxB, | ||
| const Map< const Matrix3Xd > & | xA, | ||
| const Map< const Matrix3Xd > & | xB, | ||
| const vector< Map< const Matrix3Xd >> & | d | ||
| ) |
| auto make_function | ( | ReturnType(*)(Args...) | p | ) | -> std::function<ReturnType(Args...)> |
| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
 1.8.11
1.8.11 
