|
Drake
|
|
Drake
|
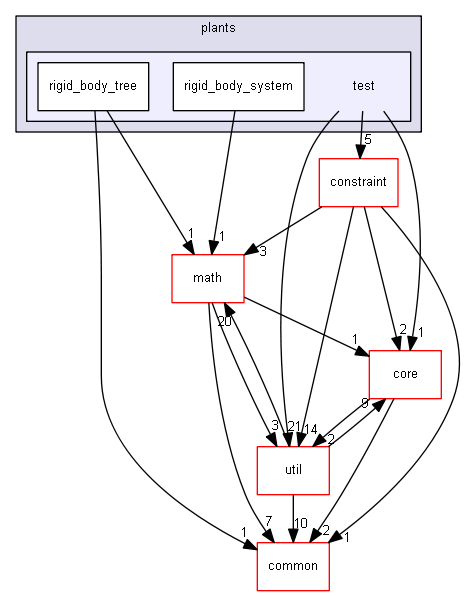
Directories | |
| directory | rigid_body_system |
| directory | rigid_body_tree |
Files | |
| file | benchmarkRigidBodyTree.cpp |
| file | bullet_collision_zero_rad_sphere_test.cpp |
| file | compareParsersmex.cpp |
| file | compareRigidBodySystems.cpp |
| file | debugManipulatorDynamics.cpp |
| file | lidarTest.cpp |
| file | load_model_test.cc |
| file | rigid_body_test.cc |
| file | testAccelerometer.cpp |
| file | testApproximateIK.cpp |
| file | testGyroscope.cpp |
| file | testIK.cpp |
| file | testIKMoreConstraints.cpp |
| file | testIKoptionsmex.cpp |
| file | testIKpointwise.cpp |
| file | testIKtraj.cpp |
| file | testKinematicsCacheChecks.cpp |
| file | testMagnetometer.cpp |
| file | testMassSpringDamper.cpp |
| file | testXmlUtil.cpp |
| file | urdf_parser_test.cc |
| file | urdfCollisionTest.cpp |
| file | urdfKinTest.cpp |
| file | urdfManipulatorDynamicsTest.cpp |
 1.8.11
1.8.11 
