|
Drake
|
|
Drake
|
#include <cstdlib>#include <iostream>#include <numeric>#include <Eigen/Dense>#include "drake/systems/plants/constraint/RigidBodyConstraint.h"#include "drake/systems/plants/IKoptions.h"#include "drake/systems/plants/RigidBodyIK.h"#include "drake/systems/plants/RigidBodyTree.h"#include "drake/util/eigen_matrix_compare.h"#include "gtest/gtest.h"
Functions | |
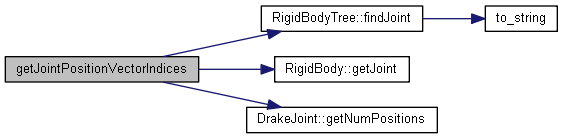
| vector< int > | getJointPositionVectorIndices (const RigidBodyTree &model, const std::string &name) |
| void | findJointAndInsert (const RigidBodyTree &model, const std::string &name, vector< int > &position_list) |
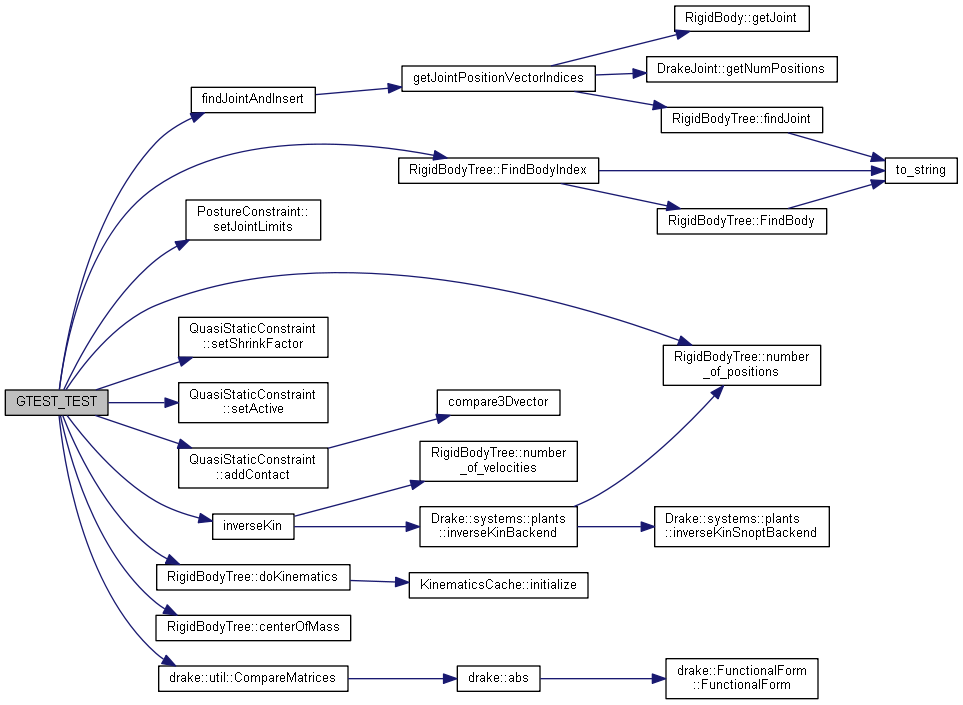
| GTEST_TEST (testIKMoreConstraints, IKMoreConstraints) | |
| void findJointAndInsert | ( | const RigidBodyTree & | model, |
| const std::string & | name, | ||
| vector< int > & | position_list | ||
| ) |


| vector<int> getJointPositionVectorIndices | ( | const RigidBodyTree & | model, |
| const std::string & | name | ||
| ) |

| GTEST_TEST | ( | testIKMoreConstraints | , |
| IKMoreConstraints | |||
| ) |
 1.8.11
1.8.11 
