|
Drake
|
|
Drake
|
#include "drake/systems/plants/RigidBodyTree.h"#include <iostream>#include <cstdlib>#include <random>#include <memory>#include <stdexcept>#include <map>#include "drake/common/eigen_types.h"#include "drake/util/drakeGeometryUtil.h"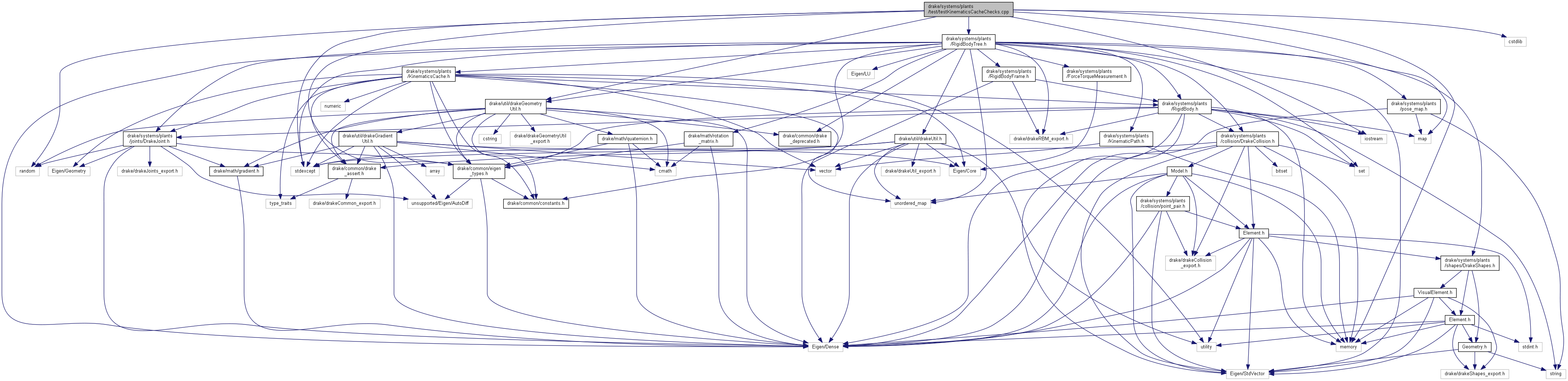
Functions | |
| template<typename O , typename F , typename... Args> | |
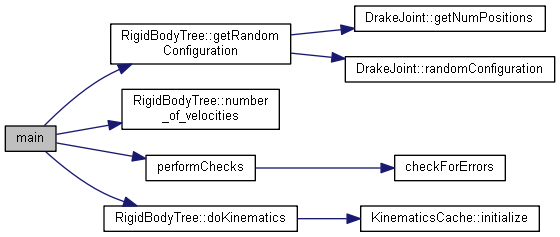
| void | checkForErrors (bool expect_error, O &object, F function, Args &&...arguments) |
| void | performChecks (RigidBodyTree &model, KinematicsCache< double > &cache, const CheckSettings &settings) |
| int | main () |
| void checkForErrors | ( | bool | expect_error, |
| O & | object, | ||
| F | function, | ||
| Args &&... | arguments | ||
| ) |

| int main | ( | ) |
| void performChecks | ( | RigidBodyTree & | model, |
| KinematicsCache< double > & | cache, | ||
| const CheckSettings & | settings | ||
| ) |


 1.8.11
1.8.11 
