|
Drake
|
|
Drake
|
#include <cmath>#include "drake/common/eigen_types.h"#include "drake/math/autodiff.h"#include "drake/systems/plants/RigidBodyTree.h"#include "drake/util/testUtil.h"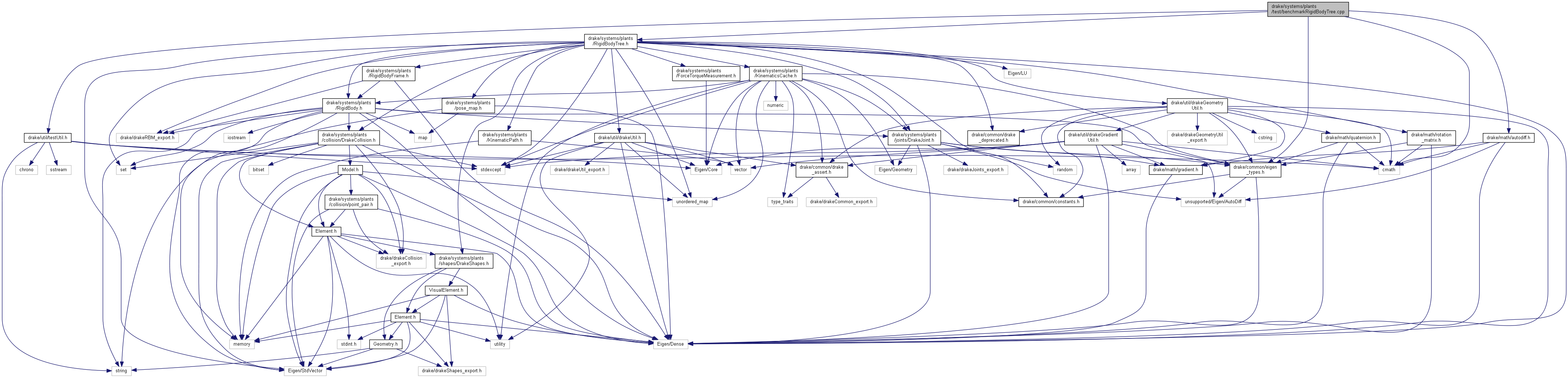
Typedefs | |
| typedef DrakeJoint::AutoDiffFixedMaxSize | AutoDiffFixedMaxSize |
| typedef AutoDiffScalar< VectorXd > | AutoDiffDynamicSize |
Functions | |
| uniform_real_distribution | uniform (0, 1) |
| template<int Rows, int Cols> | |
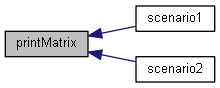
| void | printMatrix (const MatrixBase< Matrix< double, Rows, Cols >> &mat) |
| template<int Rows, int Cols, typename DerType > | |
| void | printMatrix (const MatrixBase< Matrix< AutoDiffScalar< DerType >, Rows, Cols >> &mat) |
| template<typename Scalar > | |
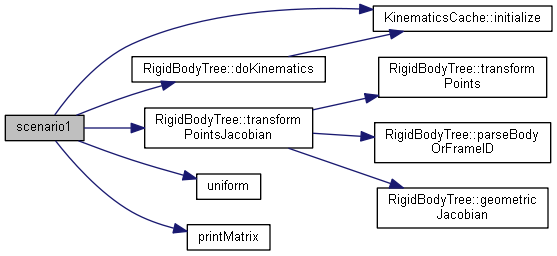
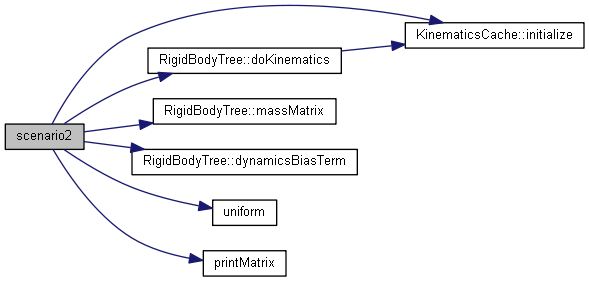
| void | scenario1 (const RigidBodyTree &model, KinematicsCache< Scalar > &cache, const vector< Matrix< Scalar, Dynamic, 1 >> &qs, const map< int, Matrix3Xd > &body_fixed_points) |
| template<typename Scalar > | |
| void | scenario2 (const RigidBodyTree &model, KinematicsCache< Scalar > &cache, const vector< pair< Matrix< Scalar, Dynamic, 1 >, Matrix< Scalar, Dynamic, 1 >>> &states) |
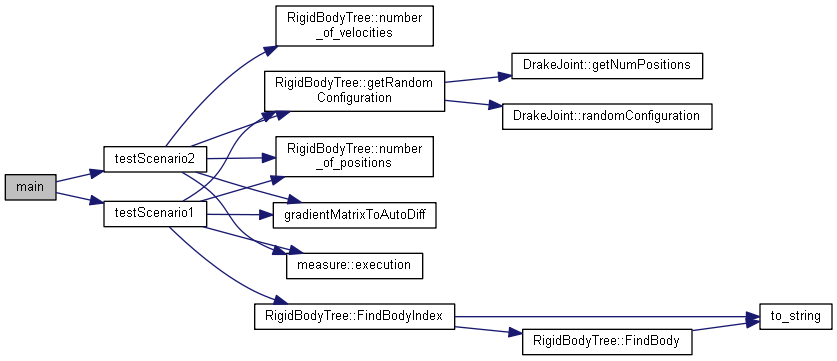
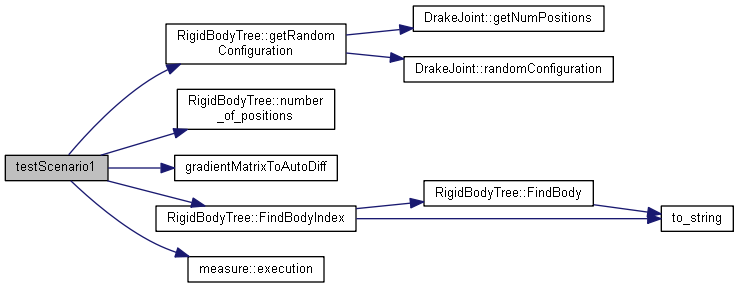
| void | testScenario1 (const RigidBodyTree &model) |
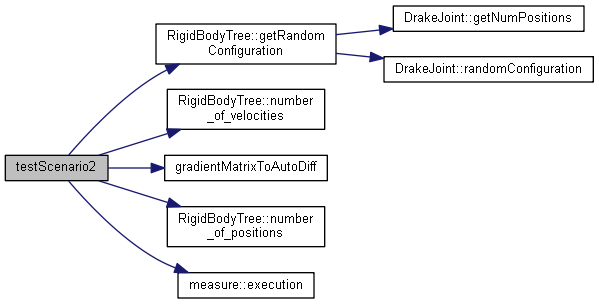
| void | testScenario2 (const RigidBodyTree &model) |
| int | main () |
Variables | |
| default_random_engine | generator |
| typedef AutoDiffScalar<VectorXd> AutoDiffDynamicSize |
| int main | ( | ) |
| void printMatrix | ( | const MatrixBase< Matrix< double, Rows, Cols >> & | mat | ) |
| void printMatrix | ( | const MatrixBase< Matrix< AutoDiffScalar< DerType >, Rows, Cols >> & | mat | ) |

| void scenario1 | ( | const RigidBodyTree & | model, |
| KinematicsCache< Scalar > & | cache, | ||
| const vector< Matrix< Scalar, Dynamic, 1 >> & | qs, | ||
| const map< int, Matrix3Xd > & | body_fixed_points | ||
| ) |
| void scenario2 | ( | const RigidBodyTree & | model, |
| KinematicsCache< Scalar > & | cache, | ||
| const vector< pair< Matrix< Scalar, Dynamic, 1 >, Matrix< Scalar, Dynamic, 1 >>> & | states | ||
| ) |
| void testScenario1 | ( | const RigidBodyTree & | model | ) |

| void testScenario2 | ( | const RigidBodyTree & | model | ) |

| uniform_real_distribution uniform | ( | 0 | , |
| 1 | |||
| ) |
| default_random_engine generator |
 1.8.11
1.8.11 
