|
Drake
|
|
Drake
|
#include <drake/systems/robotInterfaces/QPLocomotionPlan.h>
Public Types | |
| typedef std::map< std::string, Eigen::Matrix3Xd > | ContactNameToContactPointsMap |
Public Member Functions | |
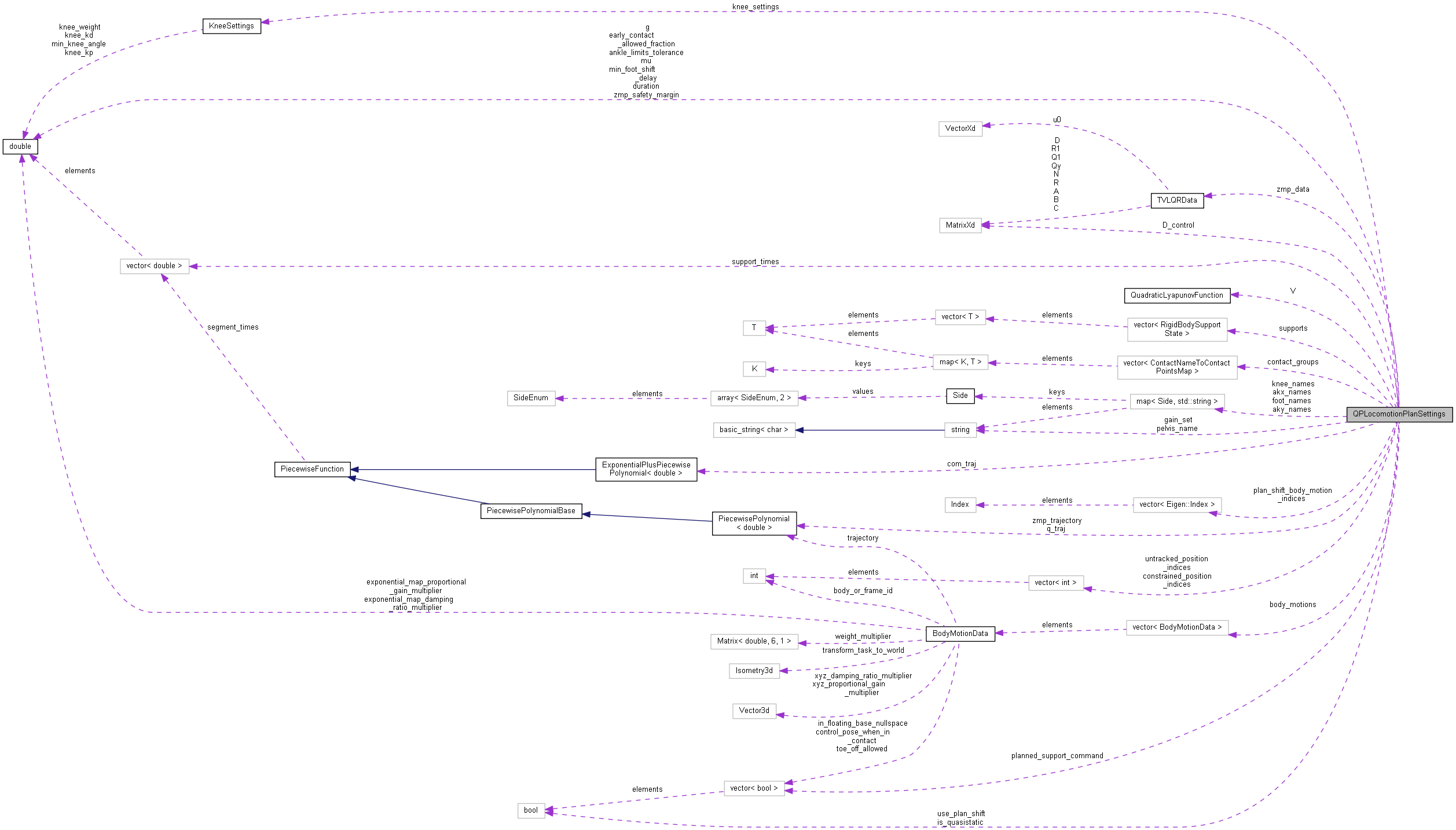
| QPLocomotionPlanSettings () | |
| void | addSupport (const RigidBodySupportState &support_state, const ContactNameToContactPointsMap &contact_group_name_to_contact_points, double duration) |
Static Public Member Functions | |
| static KneeSettings | createDefaultKneeSettings () |
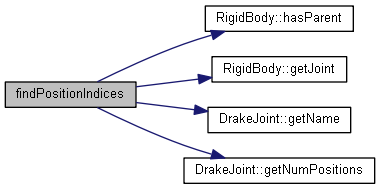
| static std::vector< int > | findPositionIndices (RigidBodyTree &robot, const std::vector< std::string > &joint_name_substrings) |
| typedef std::map<std::string, Eigen::Matrix3Xd> ContactNameToContactPointsMap |
|
inline |
|
inline |
|
inlinestatic |

|
inlinestatic |
| std::map<Side, std::string> akx_names |
| std::map<Side, std::string> aky_names |
| double ankle_limits_tolerance |
| std::vector<BodyMotionData> body_motions |
| ExponentialPlusPiecewisePolynomial<double> com_traj |
| std::vector<int> constrained_position_indices |
| std::vector<ContactNameToContactPointsMap> contact_groups |
| Eigen::MatrixXd D_control |
| double duration |
| double early_contact_allowed_fraction |
| std::map<Side, std::string> foot_names |
| double g |
| std::string gain_set |
| bool is_quasistatic |
| std::map<Side, std::string> knee_names |
| KneeSettings knee_settings |
| double min_foot_shift_delay |
| double mu |
| std::string pelvis_name |
| std::vector<Eigen::Index> plan_shift_body_motion_indices |
| std::vector<bool> planned_support_command |
| PiecewisePolynomial<double> q_traj |
| std::vector<double> support_times |
| std::vector<RigidBodySupportState> supports |
| std::vector<int> untracked_position_indices |
| bool use_plan_shift |
| TVLQRData zmp_data |
| double zmp_safety_margin |
| PiecewisePolynomial<double> zmp_trajectory |
 1.8.11
1.8.11 
