|
Drake
|
|
Drake
|
y(t) = K * exp(A * (t - t_j)) * alpha.col(j) + piecewise_polynomial_part(t) More...
#include <drake/systems/trajectories/ExponentialPlusPiecewisePolynomial.h>
Public Types | |
| typedef Eigen::Matrix< CoefficientType, Eigen::Dynamic, Eigen::Dynamic > | MatrixX |
| typedef Eigen::Matrix< CoefficientType, Eigen::Dynamic, 1 > | VectorX |
| typedef Eigen::Matrix< double, Eigen::Dynamic, 1 > | ValueType |
Public Member Functions | |
| ExponentialPlusPiecewisePolynomial () | |
| template<typename DerivedK , typename DerivedA , typename DerivedAlpha > | |
| ExponentialPlusPiecewisePolynomial (const Eigen::MatrixBase< DerivedK > &K, const Eigen::MatrixBase< DerivedA > &A, const Eigen::MatrixBase< DerivedAlpha > &alpha, const PiecewisePolynomial< CoefficientType > &piecewise_polynomial_part) | |
| ExponentialPlusPiecewisePolynomial (const PiecewisePolynomial< CoefficientType > &piecewise_polynomial_part) | |
| ValueType | value (double t) const |
| ExponentialPlusPiecewisePolynomial | derivative (int derivative_order=1) const |
| virtual Eigen::Index | rows () const |
| virtual Eigen::Index | cols () const |
| void | shiftRight (double offset) |
 Public Member Functions inherited from PiecewiseFunction Public Member Functions inherited from PiecewiseFunction | |
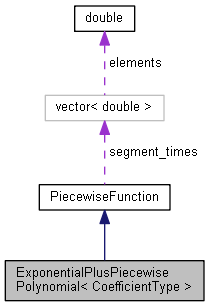
| PiecewiseFunction (std::vector< double > const &segment_times) | |
| virtual | ~PiecewiseFunction () |
| int | getNumberOfSegments () const |
| double | getStartTime (int segment_number) const |
| double | getEndTime (int segment_number) const |
| double | getDuration (int segment_number) const |
| double | getStartTime () const |
| double | getEndTime () const |
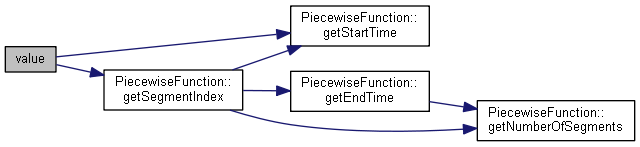
| int | getSegmentIndex (double t) const |
| const std::vector< double > & | getSegmentTimes () const |
| void | segmentNumberRangeCheck (int segment_number) const |
Additional Inherited Members | |
| Static Public Member Functions inherited from PiecewiseFunction | |
| static std::vector< double > | randomSegmentTimes (int num_segments, std::default_random_engine &generator) |
| Protected Member Functions inherited from PiecewiseFunction | |
| bool | segmentTimesEqual (const PiecewiseFunction &b, double tol) const |
| void | checkScalarValued () const |
| PiecewiseFunction () | |
| Protected Attributes inherited from PiecewiseFunction | |
| std::vector< double > | segment_times |
y(t) = K * exp(A * (t - t_j)) * alpha.col(j) + piecewise_polynomial_part(t)
| typedef Eigen::Matrix<CoefficientType, Eigen::Dynamic, Eigen::Dynamic> MatrixX |
| typedef Eigen::Matrix<CoefficientType, Eigen::Dynamic, 1> VectorX |
|
inline |
| ExponentialPlusPiecewisePolynomial | ( | const PiecewisePolynomial< CoefficientType > & | piecewise_polynomial_part | ) |

|
virtual |
Implements PiecewiseFunction.
| ExponentialPlusPiecewisePolynomial< CoefficientType > derivative | ( | int | derivative_order = 1 | ) | const |

|
virtual |
Implements PiecewiseFunction.
| void shiftRight | ( | double | offset | ) |
| ExponentialPlusPiecewisePolynomial< CoefficientType >::ValueType value | ( | double | t | ) | const |

 1.8.11
1.8.11 
