|
Drake
|
|
Drake
|
#include <drake/systems/robotInterfaces/BodyMotionData.h>
Public Member Functions | |
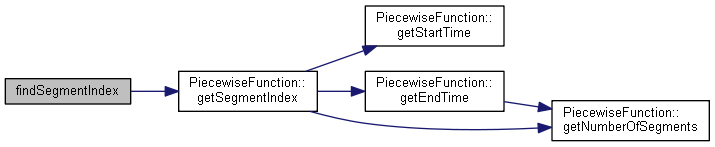
| int | findSegmentIndex (double t) const |
| int | getBodyOrFrameId () const |
| bool | isToeOffAllowed (int segment_index) const |
| bool | isInFloatingBaseNullSpace (int segment_index) const |
| bool | isPoseControlledWhenInContact (int segment_index) const |
| double | getExponentialMapDampingRatioMultiplier () const |
| double | getExponentialMapProportionalGainMultiplier () const |
| const PiecewisePolynomial< double > & | getTrajectory () const |
| PiecewisePolynomial< double > & | getTrajectory () |
| const Eigen::Isometry3d & | getTransformTaskToWorld () const |
| const Eigen::Matrix< double, 6, 1 > & | getWeightMultiplier () const |
| const Eigen::Vector3d & | getXyzDampingRatioMultiplier () const |
| const Eigen::Vector3d & | getXyzProportionalGainMultiplier () const |
Public Attributes | |
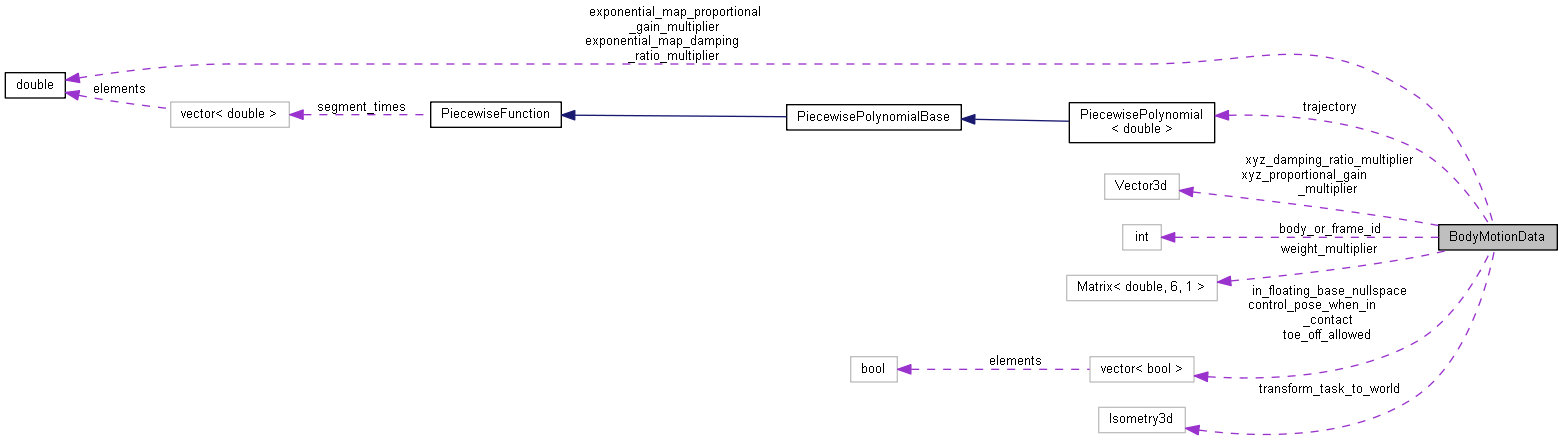
| int | body_or_frame_id |
| PiecewisePolynomial< double > | trajectory |
| std::vector< bool > | toe_off_allowed |
| std::vector< bool > | in_floating_base_nullspace |
| std::vector< bool > | control_pose_when_in_contact |
| Eigen::Isometry3d | transform_task_to_world |
| Eigen::Vector3d | xyz_proportional_gain_multiplier |
| Eigen::Vector3d | xyz_damping_ratio_multiplier |
| double | exponential_map_proportional_gain_multiplier |
| double | exponential_map_damping_ratio_multiplier |
| Eigen::Matrix< double, 6, 1 > | weight_multiplier |
| int findSegmentIndex | ( | double | t | ) | const |

| int getBodyOrFrameId | ( | ) | const |

| double getExponentialMapDampingRatioMultiplier | ( | ) | const |

| double getExponentialMapProportionalGainMultiplier | ( | ) | const |

| const PiecewisePolynomial< double > & getTrajectory | ( | ) | const |
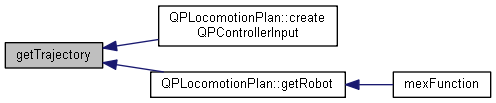
| PiecewisePolynomial< double > & getTrajectory | ( | ) |
| const Eigen::Isometry3d & getTransformTaskToWorld | ( | ) | const |

| const Eigen::Matrix< double, 6, 1 > & getWeightMultiplier | ( | ) | const |

| const Eigen::Vector3d & getXyzDampingRatioMultiplier | ( | ) | const |

| const Eigen::Vector3d & getXyzProportionalGainMultiplier | ( | ) | const |

| bool isInFloatingBaseNullSpace | ( | int | segment_index | ) | const |


| bool isPoseControlledWhenInContact | ( | int | segment_index | ) | const |


| bool isToeOffAllowed | ( | int | segment_index | ) | const |


| int body_or_frame_id |
| std::vector<bool> control_pose_when_in_contact |
| double exponential_map_damping_ratio_multiplier |
| double exponential_map_proportional_gain_multiplier |
| std::vector<bool> in_floating_base_nullspace |
| std::vector<bool> toe_off_allowed |
| PiecewisePolynomial<double> trajectory |
| Eigen::Isometry3d transform_task_to_world |
| Eigen::Matrix<double, 6, 1> weight_multiplier |
| Eigen::Vector3d xyz_damping_ratio_multiplier |
| Eigen::Vector3d xyz_proportional_gain_multiplier |
 1.8.11
1.8.11 
