|
Drake
|
|
Drake
|
#include "drake/systems/controllers/controlUtil.h"#include "drake/math/autodiff.h"#include "drake/math/expmap.h"#include "drake/math/quaternion.h"#include "drake/math/rotation_matrix.h"#include "drake/util/drakeUtil.h"
Functions | |
| template<typename DerivedA , typename DerivedB > | |
| void | getRows (std::set< int > &rows, MatrixBase< DerivedA > const &M, MatrixBase< DerivedB > &Msub) |
| template<typename DerivedA , typename DerivedB > | |
| void | getCols (std::set< int > &cols, MatrixBase< DerivedA > const &M, MatrixBase< DerivedB > &Msub) |
| template<typename DerivedPhi1 , typename DerivedPhi2 , typename DerivedD > | |
| void | angleDiff (MatrixBase< DerivedPhi1 > const &phi1, MatrixBase< DerivedPhi2 > const &phi2, MatrixBase< DerivedD > &d) |
| bool | inSupport (const std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> &supports, int body_idx) |
| void | surfaceTangents (const Vector3d &normal, Matrix< double, 3, m_surface_tangents > &d) |
| int | contactPhi (const RigidBodyTree &r, const KinematicsCache< double > &cache, SupportStateElement &supp, VectorXd &phi) |
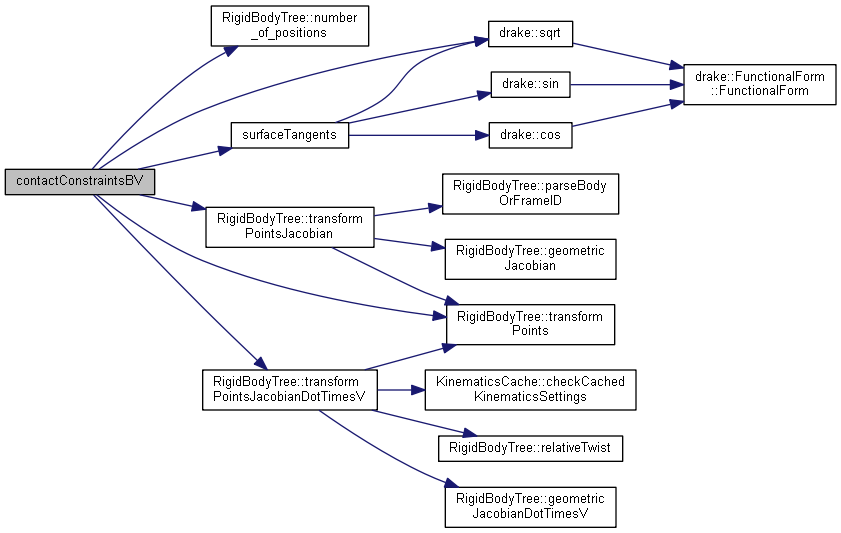
| int | contactConstraintsBV (const RigidBodyTree &r, const KinematicsCache< double > &cache, int nc, std::vector< double > support_mus, std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> &supp, MatrixXd &B, MatrixXd &JB, MatrixXd &Jp, VectorXd &Jpdotv, MatrixXd &normals) |
| MatrixXd | individualSupportCOPs (const RigidBodyTree &r, const KinematicsCache< double > &cache, const std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> &active_supports, const MatrixXd &normals, const MatrixXd &B, const VectorXd &beta) |
| bool | isSupportElementActive (SupportStateElement *se, bool contact_force_detected, bool kinematic_contact_detected) |
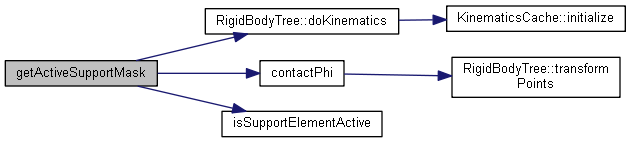
| Matrix< bool, Dynamic, 1 > | getActiveSupportMask (const RigidBodyTree &r, VectorXd q, VectorXd qd, std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> &available_supports, const Ref< const Matrix< bool, Dynamic, 1 >> &contact_force_detected, double contact_threshold) |
| std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement > > | getActiveSupports (const RigidBodyTree &r, const VectorXd &q, const VectorXd &qd, std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> &available_supports, const Ref< const Matrix< bool, Dynamic, 1 >> &contact_force_detected, double contact_threshold) |
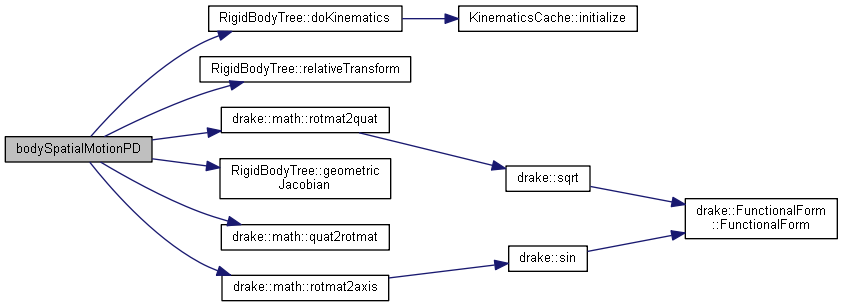
| Vector6d | bodySpatialMotionPD (const RigidBodyTree &r, const DrakeRobotState &robot_state, const int body_index, const Isometry3d &body_pose_des, const Ref< const Vector6d > &body_v_des, const Ref< const Vector6d > &body_vdot_des, const Ref< const Vector6d > &Kp, const Ref< const Vector6d > &Kd, const Isometry3d &T_task_to_world) |
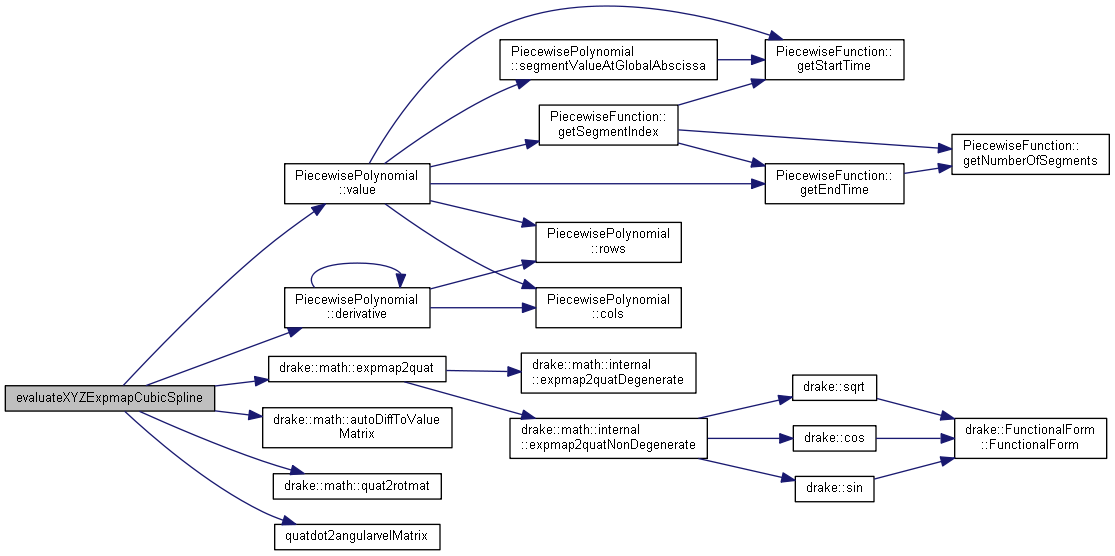
| void | evaluateXYZExpmapCubicSpline (double t, const PiecewisePolynomial< double > &spline, Isometry3d &body_pose_des, Vector6d &xyzdot_angular_vel, Vector6d &xyzddot_angular_accel) |
| void | getRobotJointIndexMap (JointNames *joint_names, RobotJointIndexMap *joint_map) |
| template DRAKECONTROLUTIL_EXPORT void | getRows (std::set< int > &, const MatrixBase< MatrixXd > &, MatrixBase< MatrixXd > &) |
| template DRAKECONTROLUTIL_EXPORT void | getCols (std::set< int > &, const MatrixBase< MatrixXd > &, MatrixBase< MatrixXd > &) |
| template DRAKECONTROLUTIL_EXPORT void | angleDiff (const MatrixBase< MatrixXd > &, const MatrixBase< MatrixXd > &, MatrixBase< MatrixXd > &) |
| template DRAKECONTROLUTIL_EXPORT void | angleDiff (const MatrixBase< Vector3d > &, const MatrixBase< Vector3d > &, MatrixBase< Vector3d > &) |
| void angleDiff | ( | MatrixBase< DerivedPhi1 > const & | phi1, |
| MatrixBase< DerivedPhi2 > const & | phi2, | ||
| MatrixBase< DerivedD > & | d | ||
| ) |

| template DRAKECONTROLUTIL_EXPORT void angleDiff | ( | const MatrixBase< MatrixXd > & | , |
| const MatrixBase< MatrixXd > & | , | ||
| MatrixBase< MatrixXd > & | |||
| ) |
| template DRAKECONTROLUTIL_EXPORT void angleDiff | ( | const MatrixBase< Vector3d > & | , |
| const MatrixBase< Vector3d > & | , | ||
| MatrixBase< Vector3d > & | |||
| ) |
| Vector6d bodySpatialMotionPD | ( | const RigidBodyTree & | r, |
| const DrakeRobotState & | robot_state, | ||
| const int | body_index, | ||
| const Isometry3d & | body_pose_des, | ||
| const Ref< const Vector6d > & | body_v_des, | ||
| const Ref< const Vector6d > & | body_vdot_des, | ||
| const Ref< const Vector6d > & | Kp, | ||
| const Ref< const Vector6d > & | Kd, | ||
| const Isometry3d & | T_task_to_world | ||
| ) |

| int contactConstraintsBV | ( | const RigidBodyTree & | r, |
| const KinematicsCache< double > & | cache, | ||
| int | nc, | ||
| std::vector< double > | support_mus, | ||
| std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> & | supp, | ||
| MatrixXd & | B, | ||
| MatrixXd & | JB, | ||
| MatrixXd & | Jp, | ||
| VectorXd & | Jpdotv, | ||
| MatrixXd & | normals | ||
| ) |

| int contactPhi | ( | const RigidBodyTree & | r, |
| const KinematicsCache< double > & | cache, | ||
| SupportStateElement & | supp, | ||
| VectorXd & | phi | ||
| ) |


| void evaluateXYZExpmapCubicSpline | ( | double | t, |
| const PiecewisePolynomial< double > & | spline, | ||
| Isometry3d & | body_pose_des, | ||
| Vector6d & | xyzdot_angular_vel, | ||
| Vector6d & | xyzddot_angular_accel | ||
| ) |

| Matrix<bool, Dynamic, 1> getActiveSupportMask | ( | const RigidBodyTree & | r, |
| VectorXd | q, | ||
| VectorXd | qd, | ||
| std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> & | available_supports, | ||
| const Ref< const Matrix< bool, Dynamic, 1 >> & | contact_force_detected, | ||
| double | contact_threshold | ||
| ) |

| std::vector<SupportStateElement, Eigen::aligned_allocator<SupportStateElement> > getActiveSupports | ( | const RigidBodyTree & | r, |
| const VectorXd & | q, | ||
| const VectorXd & | qd, | ||
| std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> & | available_supports, | ||
| const Ref< const Matrix< bool, Dynamic, 1 >> & | contact_force_detected, | ||
| double | contact_threshold | ||
| ) |


| void getCols | ( | std::set< int > & | cols, |
| MatrixBase< DerivedA > const & | M, | ||
| MatrixBase< DerivedB > & | Msub | ||
| ) |

| template DRAKECONTROLUTIL_EXPORT void getCols | ( | std::set< int > & | , |
| const MatrixBase< MatrixXd > & | , | ||
| MatrixBase< MatrixXd > & | |||
| ) |
| void getRobotJointIndexMap | ( | JointNames * | joint_names, |
| RobotJointIndexMap * | joint_map | ||
| ) |
| void getRows | ( | std::set< int > & | rows, |
| MatrixBase< DerivedA > const & | M, | ||
| MatrixBase< DerivedB > & | Msub | ||
| ) |

| template DRAKECONTROLUTIL_EXPORT void getRows | ( | std::set< int > & | , |
| const MatrixBase< MatrixXd > & | , | ||
| MatrixBase< MatrixXd > & | |||
| ) |
| MatrixXd individualSupportCOPs | ( | const RigidBodyTree & | r, |
| const KinematicsCache< double > & | cache, | ||
| const std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> & | active_supports, | ||
| const MatrixXd & | normals, | ||
| const MatrixXd & | B, | ||
| const VectorXd & | beta | ||
| ) |

| bool inSupport | ( | const std::vector< SupportStateElement, Eigen::aligned_allocator< SupportStateElement >> & | supports, |
| int | body_idx | ||
| ) |

| bool isSupportElementActive | ( | SupportStateElement * | se, |
| bool | contact_force_detected, | ||
| bool | kinematic_contact_detected | ||
| ) |

| void surfaceTangents | ( | const Vector3d & | normal, |
| Matrix< double, 3, m_surface_tangents > & | d | ||
| ) |

 1.8.11
1.8.11 
