|
Drake
|
|
Drake
|
#include "drake/common/drake_assert.h"#include "drake/math/quaternion.h"#include "drake/util/drakeUtil.h"#include "drake/util/drakeMexUtil.h"#include "drake/systems/robotInterfaces/QPLocomotionPlan.h"
| PiecewisePolynomial<double> matlabCoefsAndBreaksToPiecewisePolynomial | ( | const mxArray * | mex_coefs, |
| const mxArray * | mex_breaks, | ||
| bool | flip_last_dimension | ||
| ) |


| ExponentialPlusPiecewisePolynomial<double> matlabExpPlusPPOrPPTrajectoryOrVectorToExponentialPlusPiecewisePolynomial | ( | const mxArray * | array | ) |
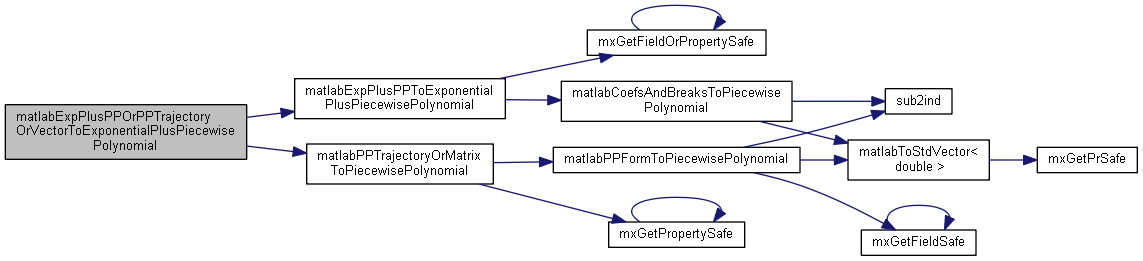

| ExponentialPlusPiecewisePolynomial<double> matlabExpPlusPPToExponentialPlusPiecewisePolynomial | ( | const mxArray * | array | ) |


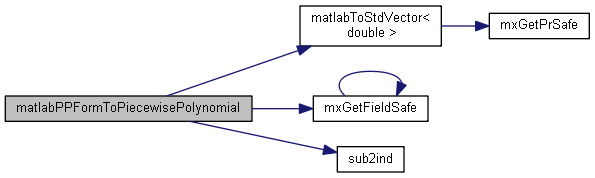
| PiecewisePolynomial<double> matlabPPFormToPiecewisePolynomial | ( | const mxArray * | pp | ) |

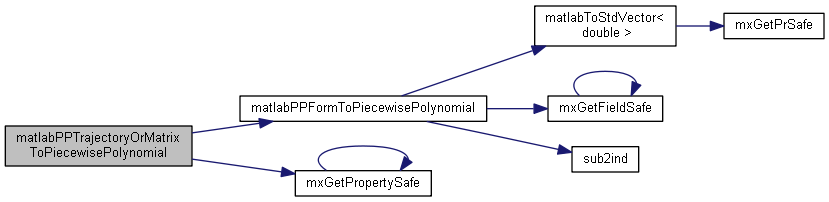
| PiecewisePolynomial<double> matlabPPTrajectoryOrMatrixToPiecewisePolynomial | ( | const mxArray * | array | ) |

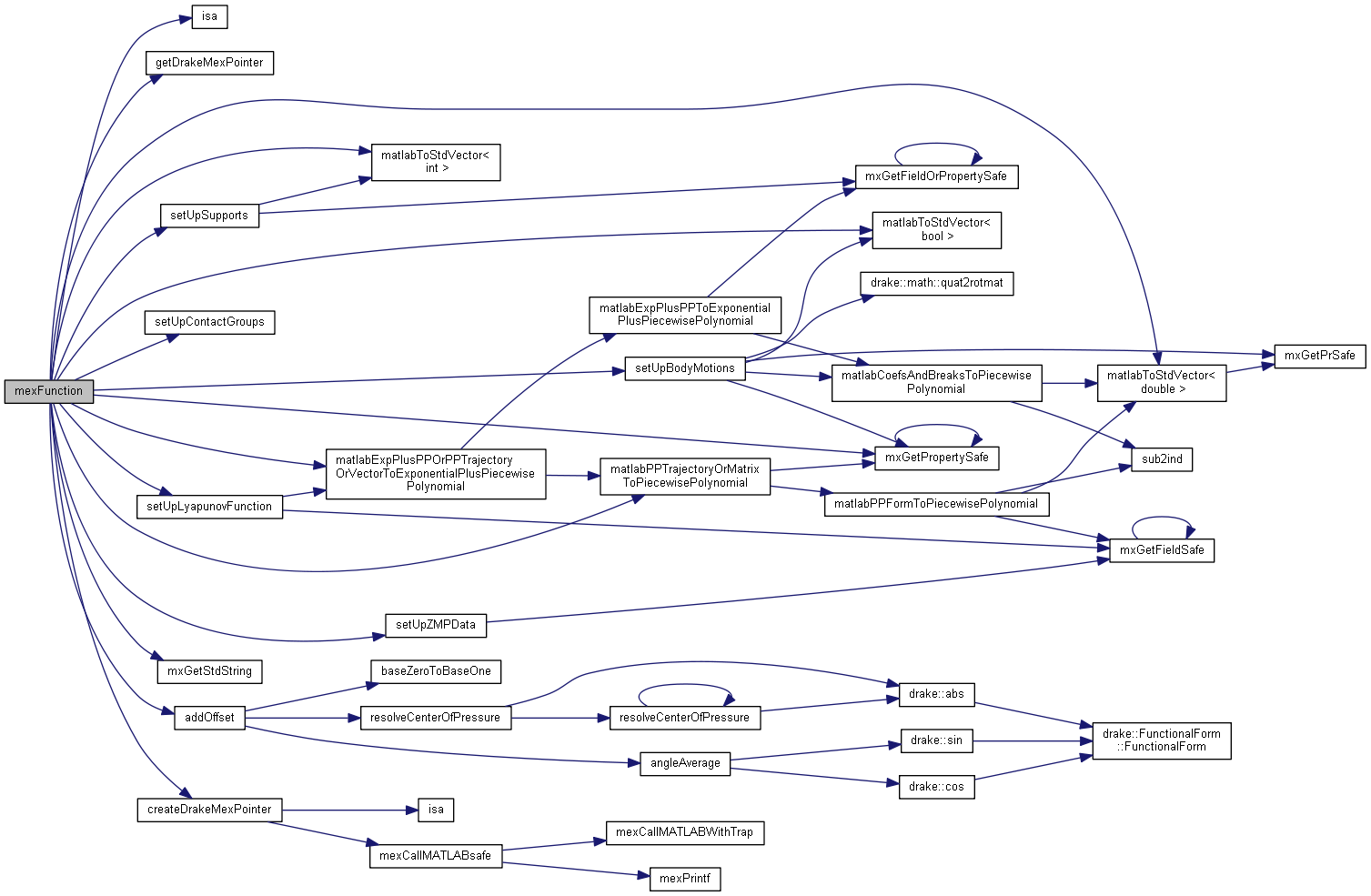
| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
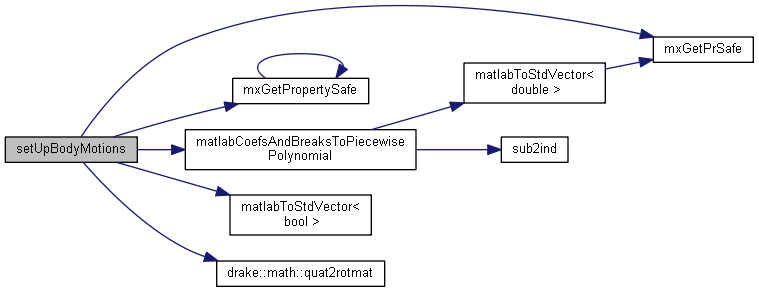
| std::vector<BodyMotionData> setUpBodyMotions | ( | const mxArray * | mex_body_motions | ) |

| std::vector<QPLocomotionPlanSettings::ContactNameToContactPointsMap> setUpContactGroups | ( | RigidBodyTree * | robot, |
| const mxArray * | mex_contact_groups | ||
| ) |

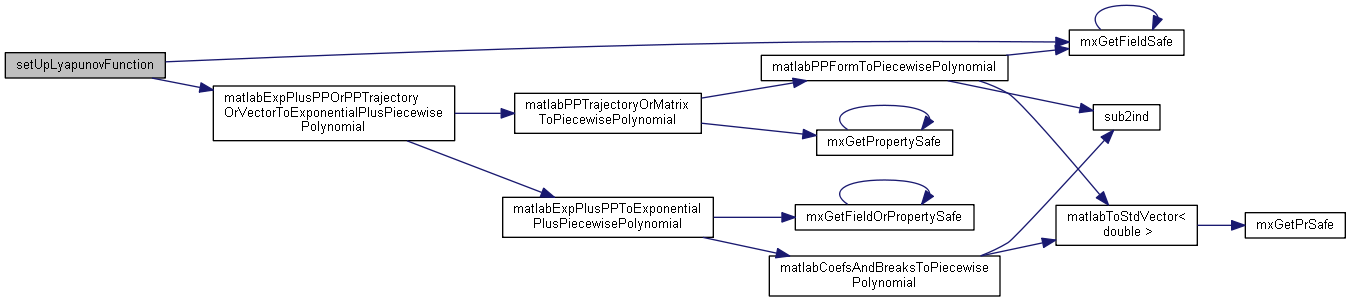
| QuadraticLyapunovFunction setUpLyapunovFunction | ( | const mxArray * | mex_V | ) |

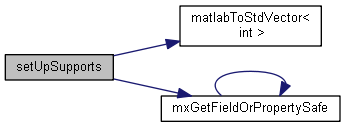
| std::vector<RigidBodySupportState> setUpSupports | ( | const mxArray * | mex_supports | ) |

| TVLQRData setUpZMPData | ( | const mxArray * | mex_zmp_data | ) |

 1.8.11
1.8.11 
