|
| | OptimizationProblem () |
| |
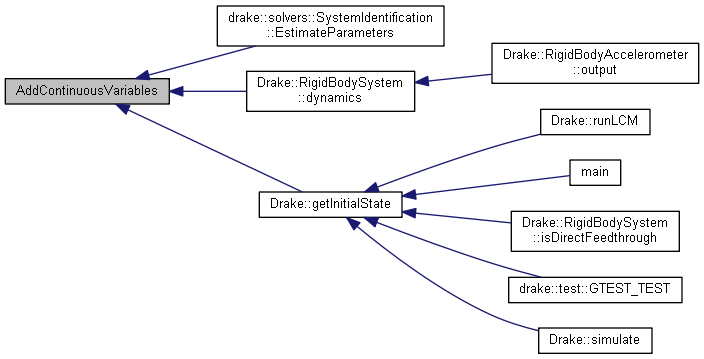
| const DecisionVariableView | AddContinuousVariables (std::size_t num_new_vars, std::string name="x") |
| |
| void | AddCost (std::shared_ptr< Constraint > const &obj, VariableList const &vars) |
| |
| void | AddCost (std::shared_ptr< Constraint > const &obj) |
| |
| template<typename F > |
| std::enable_if< !std::is_convertible< F, std::shared_ptr< Constraint > >::value, std::shared_ptr< Constraint > >::type | AddCost (F &&f, VariableList const &vars) |
| |
| template<typename F > |
| std::enable_if< !std::is_convertible< F, std::shared_ptr< Constraint > >::value, std::shared_ptr< Constraint > >::type | AddCost (F &&f) |
| |
| template<typename F > |
| std::shared_ptr< Constraint > | AddCost (std::unique_ptr< F > &&f, VariableList const &vars) |
| |
| template<typename F > |
| std::shared_ptr< Constraint > | AddCost (std::unique_ptr< F > &&f) |
| |
| template<typename DerivedQ , typename Derivedb > |
| std::shared_ptr< QuadraticConstraint > | AddQuadraticErrorCost (const Eigen::MatrixBase< DerivedQ > &Q, const Eigen::MatrixBase< Derivedb > &x_desired, const VariableList &vars) |
| | AddQuadraticErrorCost. More...
|
| |
| template<typename DerivedQ , typename Derivedb > |
| std::shared_ptr< QuadraticConstraint > | AddQuadraticErrorCost (const Eigen::MatrixBase< DerivedQ > &Q, const Eigen::MatrixBase< Derivedb > &x_desired) |
| | AddQuadraticErrorCost. More...
|
| |
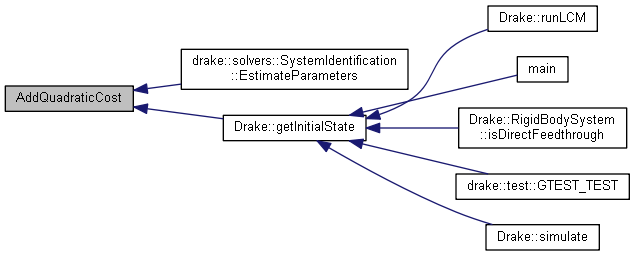
| void | AddQuadraticCost (std::shared_ptr< QuadraticConstraint > const &obj, VariableList const &vars) |
| | AddQuadraticCost. More...
|
| |
| void | AddQuadraticCost (std::shared_ptr< QuadraticConstraint > const &obj) |
| | AddQuadraticCost. More...
|
| |
| template<typename DerivedQ , typename Derivedb > |
| std::shared_ptr< QuadraticConstraint > | AddQuadraticCost (const Eigen::MatrixBase< DerivedQ > &Q, const Eigen::MatrixBase< Derivedb > &b, const VariableList &vars) |
| | AddQuadraticCost. More...
|
| |
| template<typename DerivedQ , typename Derivedb > |
| std::shared_ptr< QuadraticConstraint > | AddQuadraticCost (const Eigen::MatrixBase< DerivedQ > &Q, const Eigen::MatrixBase< Derivedb > &b) |
| | AddQuadraticCost. More...
|
| |
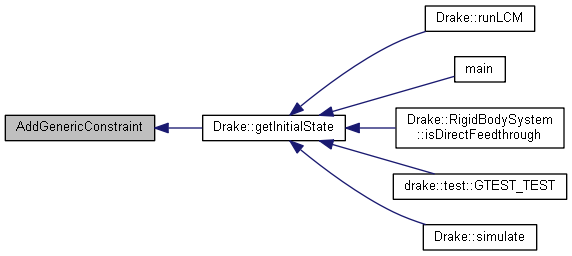
| void | AddGenericConstraint (std::shared_ptr< Constraint > con, VariableList const &vars) |
| | AddGenericConstraint. More...
|
| |
| void | AddGenericConstraint (std::shared_ptr< Constraint > con) |
| |
| void | AddLinearConstraint (std::shared_ptr< LinearConstraint > con, VariableList const &vars) |
| | AddLinearConstraint. More...
|
| |
| void | AddLinearConstraint (std::shared_ptr< LinearConstraint > con) |
| | AddLinearConstraint. More...
|
| |
| template<typename DerivedA , typename DerivedLB , typename DerivedUB > |
| std::shared_ptr< LinearConstraint > | AddLinearConstraint (const Eigen::MatrixBase< DerivedA > &A, const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub, const VariableList &vars) |
| | AddLinearConstraint. More...
|
| |
| template<typename DerivedA , typename DerivedLB , typename DerivedUB > |
| std::shared_ptr< LinearConstraint > | AddLinearConstraint (const Eigen::MatrixBase< DerivedA > &A, const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub) |
| | AddLinearConstraint. More...
|
| |
| void | AddLinearEqualityConstraint (std::shared_ptr< LinearEqualityConstraint > con, VariableList const &vars) |
| | AddLinearEqualityConstraint. More...
|
| |
| void | AddLinearEqualityConstraint (std::shared_ptr< LinearEqualityConstraint > con) |
| | AddLinearEqualityConstraint. More...
|
| |
| template<typename DerivedA , typename DerivedB > |
| std::shared_ptr< LinearEqualityConstraint > | AddLinearEqualityConstraint (const Eigen::MatrixBase< DerivedA > &Aeq, const Eigen::MatrixBase< DerivedB > &beq, const VariableList &vars) |
| | AddLinearEqualityConstraint. More...
|
| |
| template<typename DerivedA , typename DerivedB > |
| std::shared_ptr< LinearEqualityConstraint > | AddLinearEqualityConstraint (const Eigen::MatrixBase< DerivedA > &Aeq, const Eigen::MatrixBase< DerivedB > &beq) |
| | AddLinearEqualityConstraint. More...
|
| |
| void | AddBoundingBoxConstraint (std::shared_ptr< BoundingBoxConstraint > con, VariableList const &vars) |
| | AddBoundingBoxConstraint. More...
|
| |
| void | AddBoundingBoxConstraint (std::shared_ptr< BoundingBoxConstraint > con) |
| | AddBoundingBoxConstraint. More...
|
| |
| template<typename DerivedLB , typename DerivedUB > |
| std::shared_ptr< BoundingBoxConstraint > | AddBoundingBoxConstraint (const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub, const VariableList &vars) |
| | AddBoundingBoxConstraint. More...
|
| |
| template<typename DerivedLB , typename DerivedUB > |
| std::shared_ptr< BoundingBoxConstraint > | AddBoundingBoxConstraint (const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub) |
| | AddBoundingBoxConstraint. More...
|
| |
| template<typename DerivedM , typename Derivedq > |
| std::shared_ptr< LinearComplementarityConstraint > | AddLinearComplementarityConstraint (const Eigen::MatrixBase< DerivedM > &M, const Eigen::MatrixBase< Derivedq > &q, const VariableList &vars) |
| | AddLinearComplementarityConstraint. More...
|
| |
| template<typename DerivedM , typename Derivedq > |
| std::shared_ptr< LinearComplementarityConstraint > | AddLinearComplementarityConstraint (const Eigen::MatrixBase< DerivedM > &M, const Eigen::MatrixBase< Derivedq > &q) |
| | AddLinearComplementarityConstraint. More...
|
| |
| std::shared_ptr< Constraint > | AddPolynomialConstraint (const VectorXPoly &polynomials, const std::vector< Polynomiald::VarType > &poly_vars, const Eigen::VectorXd &lb, const Eigen::VectorXd &ub, const VariableList &vars) |
| | AddPolynomialConstraint. More...
|
| |
| std::shared_ptr< Constraint > | AddPolynomialConstraint (const VectorXPoly &polynomials, const std::vector< Polynomiald::VarType > &poly_vars, const Eigen::VectorXd &lb, const Eigen::VectorXd &ub) |
| | AddPolynomialConstraint. More...
|
| |
| template<typename Derived > |
| void | SetInitialGuess (const DecisionVariableView &var, const Eigen::MatrixBase< Derived > &x0) |
| |
| SolutionResult | Solve () |
| | Solve the OptimizationProblem. More...
|
| |
| void | PrintSolution () |
| |
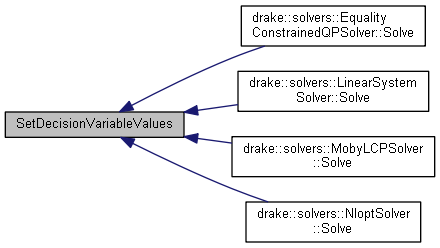
| template<typename Derived > |
| void | SetDecisionVariableValues (const Eigen::MatrixBase< Derived > &x) |
| |
| void | SetSolverOption (const std::string &solver_name, const std::string &solver_option, double option_value) |
| | Set an option for a particular solver. More...
|
| |
| void | SetSolverOption (const std::string &solver_name, const std::string &solver_option, int option_value) |
| |
| void | SetSolverOption (const std::string &solver_name, const std::string &solver_option, const std::string &option_value) |
| |
| const std::map< std::string, double > & | GetSolverOptionsDouble (const std::string &solver_name) |
| |
| const std::map< std::string, int > & | GetSolverOptionsInt (const std::string &solver_name) |
| |
| const std::map< std::string, std::string > & | GetSolverOptionsStr (const std::string &solver_name) |
| |
| void | GetSolverResult (std::string *solver_name, int *solver_result) const |
| | Get the name and result code of the particular solver which was used to solve this OptimizationProblem. More...
|
| |
| void | SetSolverResult (const std::string &solver_name, int solver_result) |
| |
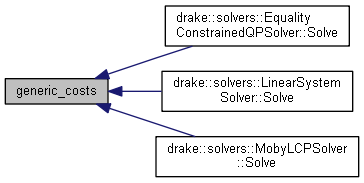
| const std::list< Binding< Constraint > > & | generic_costs () const |
| |
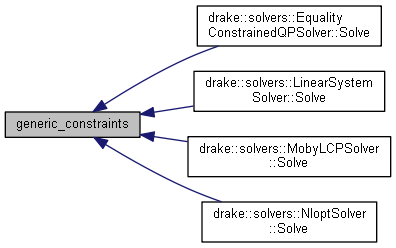
| const std::list< Binding< Constraint > > & | generic_constraints () const |
| |
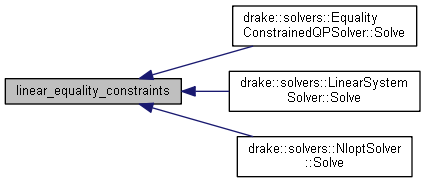
| const std::list< Binding< LinearEqualityConstraint > > & | linear_equality_constraints () const |
| |
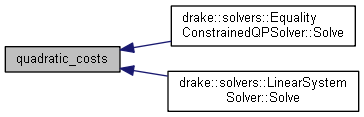
| const std::list< Binding< QuadraticConstraint > > & | quadratic_costs () const |
| | Getter for quadratic costs. More...
|
| |
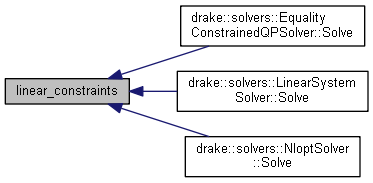
| const std::list< Binding< LinearConstraint > > & | linear_constraints () const |
| |
| std::list< Binding< Constraint > > | GetAllCosts () const |
| | GetAllCosts. More...
|
| |
| std::list< Binding< LinearConstraint > > | GetAllLinearConstraints () const |
| |
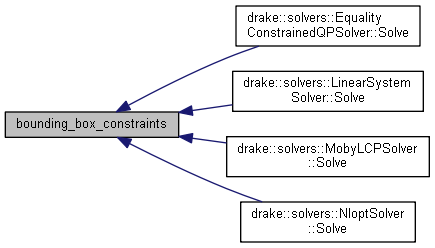
| const std::list< Binding< BoundingBoxConstraint > > & | bounding_box_constraints () const |
| |
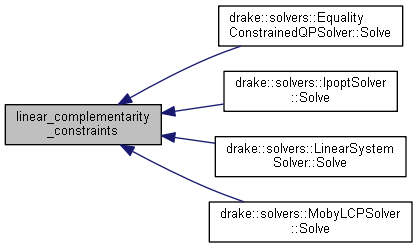
| const std::list< Binding< LinearComplementarityConstraint > > & | linear_complementarity_constraints () const |
| |
| template<typename T > |
| std::shared_ptr< T > | GetSolverData () |
| |
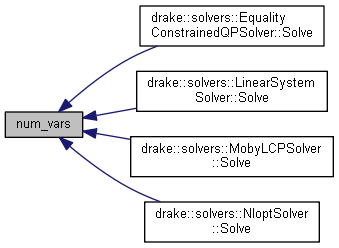
| size_t | num_vars () const |
| |
| const Eigen::VectorXd & | initial_guess () const |
| |











 1.8.11
1.8.11 
