|
| template<typename DerivedA , typename DerivedB > |
| | LinearEqualityConstraint (const Eigen::MatrixBase< DerivedA > &Aeq, const Eigen::MatrixBase< DerivedB > &beq) |
| |
| | ~LinearEqualityConstraint () override |
| |
| template<typename DerivedA , typename DerivedB > |
| void | updateConstraint (const Eigen::MatrixBase< DerivedA > &Aeq, const Eigen::MatrixBase< DerivedB > &beq) |
| |
| | LinearConstraint (size_t num_constraints) |
| |
| template<typename DerivedA , typename DerivedLB , typename DerivedUB > |
| | LinearConstraint (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub) |
| |
| | ~LinearConstraint () override |
| |
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const override |
| |
| void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const override |
| |
| virtual Eigen::SparseMatrix< double > | GetSparseMatrix () const |
| |
| virtual const Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > & | A () const |
| |
| | Constraint (size_t num_constraints) |
| |
| template<typename DerivedLB , typename DerivedUB > |
| | Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) |
| |
| virtual | ~Constraint () |
| |
| Eigen::VectorXd const & | lower_bound () const |
| |
| Eigen::VectorXd const & | upper_bound () const |
| |
| size_t | num_constraints () const |
| |
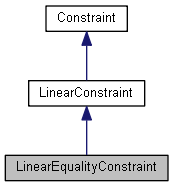
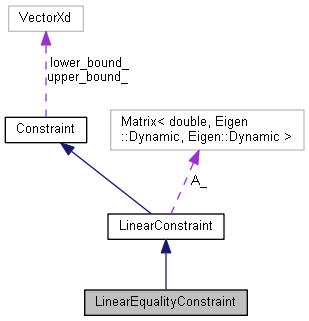
Implements a constraint of the form Ax = b .
 Public Member Functions inherited from LinearConstraint
Public Member Functions inherited from LinearConstraint 1.8.11
1.8.11 
