|
Drake
|
|
Drake
|
lb <= .5 x'Qx + b'x <= ub More...
#include <drake/solvers/Constraint.h>
Public Member Functions | |
| template<typename DerivedQ , typename Derivedb > | |
| QuadraticConstraint (const Eigen::MatrixBase< DerivedQ > &Q, const Eigen::MatrixBase< Derivedb > &b, double lb, double ub) | |
| ~QuadraticConstraint () override | |
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const override |
| void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const override |
| virtual const Eigen::MatrixXd & | Q () const |
| virtual const Eigen::VectorXd & | b () const |
 Public Member Functions inherited from Constraint Public Member Functions inherited from Constraint | |
| Constraint (size_t num_constraints) | |
| template<typename DerivedLB , typename DerivedUB > | |
| Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) | |
| virtual | ~Constraint () |
| Eigen::VectorXd const & | lower_bound () const |
| Eigen::VectorXd const & | upper_bound () const |
| size_t | num_constraints () const |
Static Public Attributes | |
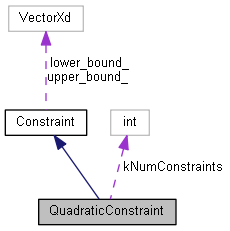
| static const int | kNumConstraints = 1 |
Additional Inherited Members | |
| Protected Attributes inherited from Constraint | |
| Eigen::VectorXd | lower_bound_ |
| Eigen::VectorXd | upper_bound_ |
lb <= .5 x'Qx + b'x <= ub
|
inline |
|
inlineoverride |
|
inlinevirtual |
|
inlineoverridevirtual |
|
inlineoverridevirtual |
|
inlinevirtual |
|
static |
 1.8.11
1.8.11 


