|
Drake
|
|
Drake
|
A constraint is a function + lower and upper bounds. More...
#include <drake/solvers/Constraint.h>
Public Member Functions | |
| Constraint (size_t num_constraints) | |
| template<typename DerivedLB , typename DerivedUB > | |
| Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) | |
| virtual | ~Constraint () |
| virtual void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const =0 |
| virtual void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const =0 |
| Eigen::VectorXd const & | lower_bound () const |
| Eigen::VectorXd const & | upper_bound () const |
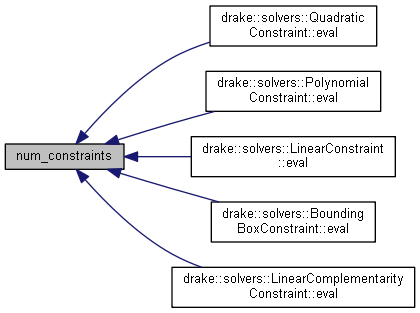
| size_t | num_constraints () const |
Protected Attributes | |
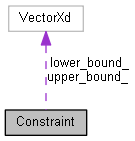
| Eigen::VectorXd | lower_bound_ |
| Eigen::VectorXd | upper_bound_ |
A constraint is a function + lower and upper bounds.
Some thoughts: It should support evaluating the constraint, adding it to an optimization problem, and have support for constraints that require slack variables (adding additional decision variables to the problem). There should also be some notion of parameterized constraints: e.g. the acceleration constraints in the rigid body dynamics are constraints on vdot and f, but are "parameterized" by q and v.
|
inlineexplicit |
|
inline |
|
inlinevirtual |

|
pure virtual |
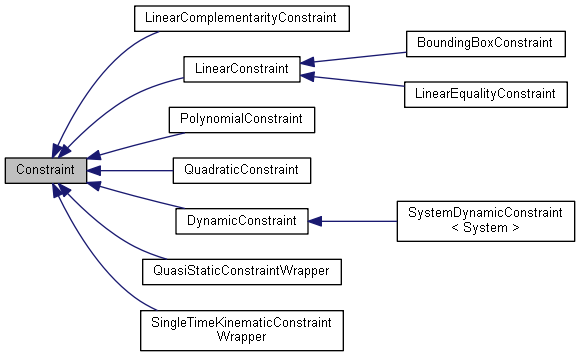
Implemented in LinearComplementarityConstraint, BoundingBoxConstraint, LinearConstraint, PolynomialConstraint, QuasiStaticConstraintWrapper, QuadraticConstraint, SingleTimeKinematicConstraintWrapper, and DynamicConstraint.

|
pure virtual |
|
inline |
|
inline |
|
inline |
|
protected |
|
protected |
 1.8.11
1.8.11 
