|
| template<typename DerivedLB , typename DerivedUB > |
| | BoundingBoxConstraint (const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub) |
| |
| | ~BoundingBoxConstraint () override |
| |
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &x, Eigen::VectorXd &y) const override |
| |
| void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const override |
| |
| | LinearConstraint (size_t num_constraints) |
| |
| template<typename DerivedA , typename DerivedLB , typename DerivedUB > |
| | LinearConstraint (const Eigen::MatrixBase< DerivedA > &a, const Eigen::MatrixBase< DerivedLB > &lb, const Eigen::MatrixBase< DerivedUB > &ub) |
| |
| | ~LinearConstraint () override |
| |
| virtual Eigen::SparseMatrix< double > | GetSparseMatrix () const |
| |
| virtual const Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > & | A () const |
| |
| | Constraint (size_t num_constraints) |
| |
| template<typename DerivedLB , typename DerivedUB > |
| | Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) |
| |
| virtual | ~Constraint () |
| |
| Eigen::VectorXd const & | lower_bound () const |
| |
| Eigen::VectorXd const & | upper_bound () const |
| |
| size_t | num_constraints () const |
| |
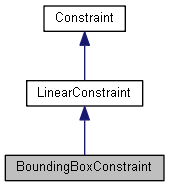
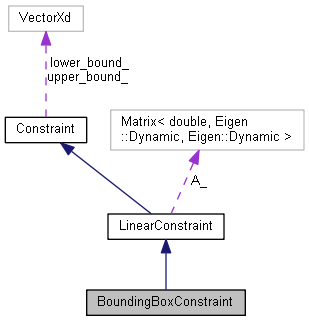
Implements a constraint of the form lb <= x <= ub .
Note: the base Constraint class (as implemented at the moment) could play this role. But this class enforces that it is ONLY a bounding box constraint, and not something more general. Some solvers use this information to handle bounding box constraints differently than general constraints, so use of this form is encouraged.
 Public Member Functions inherited from LinearConstraint
Public Member Functions inherited from LinearConstraint 1.8.11
1.8.11 


