|
Drake
|
|
Drake
|
#include "yamlUtil.h"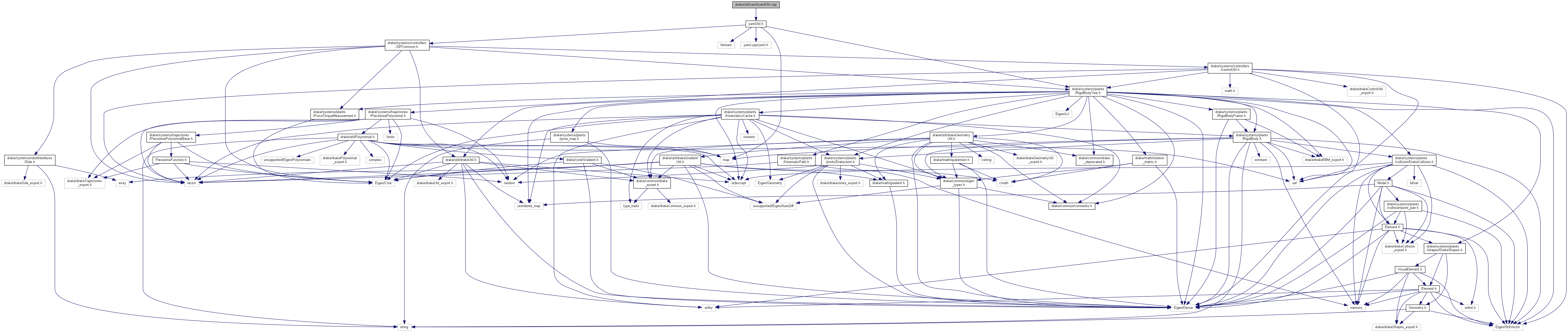
Namespaces | |
| YAML | |
Functions | |
| YAML::Node | applyDefaults (const YAML::Node &node, const YAML::Node &default_node) |
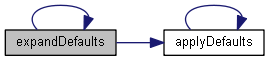
| YAML::Node | expandDefaults (const YAML::Node &node) |
| double | dampingGain (double Kp, double damping_ratio) |
| YAML::Node | get (const YAML::Node &parent, const std::string &key) |
| void | loadBodyMotionParams (QPControllerParams ¶ms, const YAML::Node &config, const RigidBodyTree &robot) |
| void | loadSingleJointParams (QPControllerParams ¶ms, Eigen::DenseIndex position_index, const YAML::Node &config, const RigidBodyTree &robot) |
| void | loadJointParams (QPControllerParams ¶ms, const YAML::Node &config, const RigidBodyTree &robot) |
| void | loadSingleInputParams (QPControllerParams ¶ms, Eigen::DenseIndex position_index, YAML::Node config, const RigidBodyTree &robot) |
| void | loadInputParams (QPControllerParams ¶ms, const YAML::Node &config, const RigidBodyTree &robot) |
| QPControllerParams | loadSingleParamSet (const YAML::Node &config, const RigidBodyTree &robot) |
| std::map< std::string, QPControllerParams > | loadAllParamSetsFromExpandedConfig (YAML::Node config, const RigidBodyTree &robot) |
| std::map< std::string, QPControllerParams > | loadAllParamSets (YAML::Node config, const RigidBodyTree &robot) |
| std::map< std::string, QPControllerParams > | loadAllParamSets (YAML::Node config, const RigidBodyTree &robot, std::ofstream &debug_output_file) |
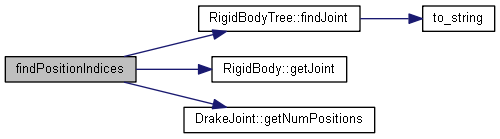
| vector< int > | findPositionIndices (const RigidBodyTree &robot, const vector< string > &joint_names) |
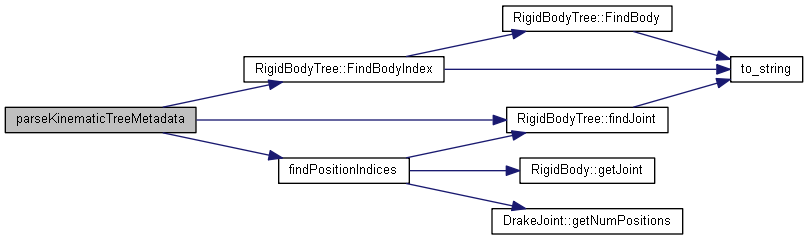
| RobotPropertyCache | parseKinematicTreeMetadata (const YAML::Node &metadata, const RigidBodyTree &robot) |
| JointNames | parseRobotJointNames (const YAML::Node &joint_names, const RigidBodyTree &tree) |
| KinematicModifications | parseKinematicModifications (const YAML::Node &modifications) |
| YAML::Node applyDefaults | ( | const YAML::Node & | node, |
| const YAML::Node & | default_node | ||
| ) |




| YAML::Node expandDefaults | ( | const YAML::Node & | node | ) |

| vector<int> findPositionIndices | ( | const RigidBodyTree & | robot, |
| const vector< string > & | joint_names | ||
| ) |

| YAML::Node get | ( | const YAML::Node & | parent, |
| const std::string & | key | ||
| ) |
| std::map<std::string, QPControllerParams> loadAllParamSets | ( | YAML::Node | config, |
| const RigidBodyTree & | robot | ||
| ) |

| std::map<std::string, QPControllerParams> loadAllParamSets | ( | YAML::Node | config, |
| const RigidBodyTree & | robot, | ||
| std::ofstream & | debug_output_file | ||
| ) |

| std::map<std::string, QPControllerParams> loadAllParamSetsFromExpandedConfig | ( | YAML::Node | config, |
| const RigidBodyTree & | robot | ||
| ) |


| void loadBodyMotionParams | ( | QPControllerParams & | params, |
| const YAML::Node & | config, | ||
| const RigidBodyTree & | robot | ||
| ) |

| void loadInputParams | ( | QPControllerParams & | params, |
| const YAML::Node & | config, | ||
| const RigidBodyTree & | robot | ||
| ) |


| void loadJointParams | ( | QPControllerParams & | params, |
| const YAML::Node & | config, | ||
| const RigidBodyTree & | robot | ||
| ) |


| void loadSingleInputParams | ( | QPControllerParams & | params, |
| Eigen::DenseIndex | position_index, | ||
| YAML::Node | config, | ||
| const RigidBodyTree & | robot | ||
| ) |

| void loadSingleJointParams | ( | QPControllerParams & | params, |
| Eigen::DenseIndex | position_index, | ||
| const YAML::Node & | config, | ||
| const RigidBodyTree & | robot | ||
| ) |


| QPControllerParams loadSingleParamSet | ( | const YAML::Node & | config, |
| const RigidBodyTree & | robot | ||
| ) |


| KinematicModifications parseKinematicModifications | ( | const YAML::Node & | modifications | ) |

| RobotPropertyCache parseKinematicTreeMetadata | ( | const YAML::Node & | metadata, |
| const RigidBodyTree & | robot | ||
| ) |
| JointNames parseRobotJointNames | ( | const YAML::Node & | joint_names, |
| const RigidBodyTree & | tree | ||
| ) |

 1.8.11
1.8.11 
