|
Drake
|
|
Drake
|
#include <drake/systems/controllers/QPCommon.h>
Public Member Functions | |
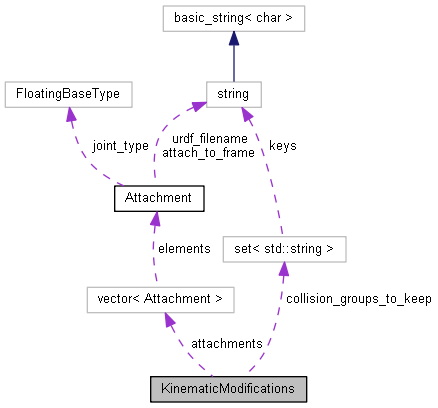
| KinematicModifications (const std::set< std::string > &collision_groups_to_keep_={"heel","toe"}, const std::vector< Attachment > &attachments_=std::vector< Attachment >()) | |
Public Attributes | |
| std::set< std::string > | collision_groups_to_keep |
| std::vector< Attachment > | attachments |
|
inline |
| std::vector<Attachment> attachments |
| std::set<std::string> collision_groups_to_keep |
 1.8.11
1.8.11 
