|
Drake
|
|
Drake
|
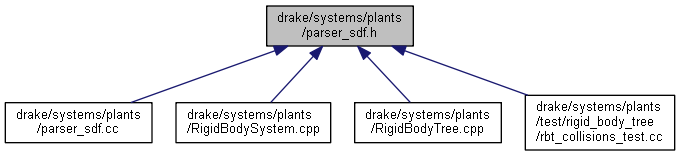
#include <map>#include <string>#include "drake/drakeRBM_export.h"#include "drake/systems/plants/RigidBodyFrame.h"#include "drake/systems/plants/RigidBodyTree.h"#include "drake/systems/plants/xmlUtil.h"#include "drake/thirdParty/zlib/tinyxml2/tinyxml2.h"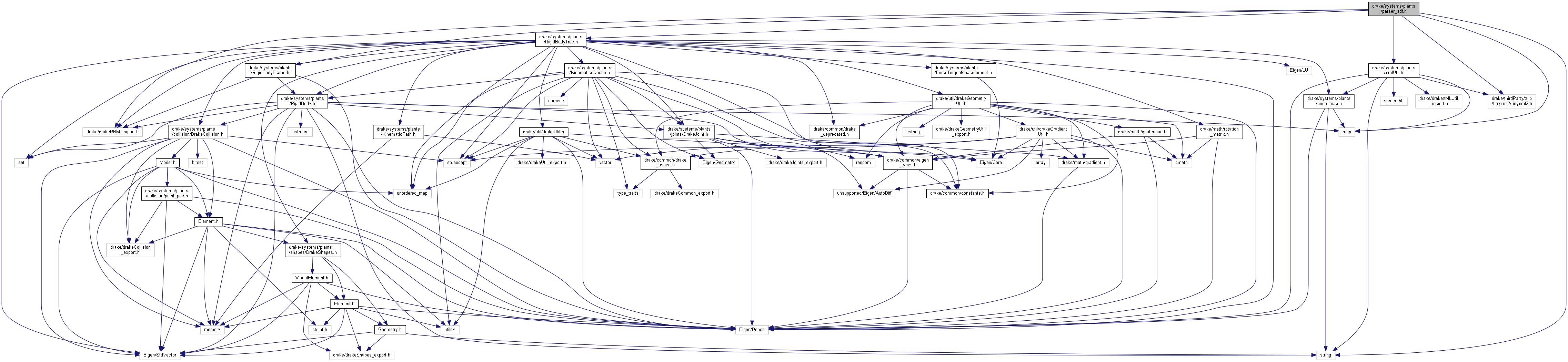
Go to the source code of this file.
Namespaces | |
| drake | |
| drake::parsers | |
| drake::parsers::sdf | |
Functions | |
| void | AddRobotFromSDFInWorldFrame (const std::string &sdf_filename, const DrakeJoint::FloatingBaseType floating_base_type, RigidBodyTree *tree) |
| Adds a SDF model to a rigid body system. More... | |
| void | AddRobotFromSDF (const std::string &sdf_filename, const DrakeJoint::FloatingBaseType floating_base_type, std::shared_ptr< RigidBodyFrame > weld_to_frame, RigidBodyTree *tree) |
| Adds a SDF model to a rigid body system. More... | |
 1.8.11
1.8.11 
