|
Drake
|
|
Drake
|
#include <drake/systems/plants/ConstraintWrappers.h>
Public Member Functions | |
| QuasiStaticConstraintWrapper (const QuasiStaticConstraint *rigid_body_constraint, KinematicsCacheHelper< double > *kin_helper) | |
| All pointers are aliased for the lifetime of the wrapper. More... | |
| virtual | ~QuasiStaticConstraintWrapper () |
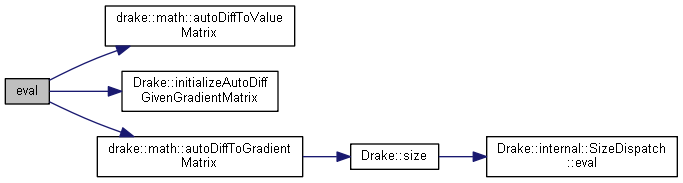
| void | eval (const Eigen::Ref< const Eigen::VectorXd > &q, Eigen::VectorXd &y) const override |
| void | eval (const Eigen::Ref< const TaylorVecXd > &tq, TaylorVecXd &ty) const override |
 Public Member Functions inherited from Constraint Public Member Functions inherited from Constraint | |
| Constraint (size_t num_constraints) | |
| template<typename DerivedLB , typename DerivedUB > | |
| Constraint (size_t num_constraints, Eigen::MatrixBase< DerivedLB > const &lb, Eigen::MatrixBase< DerivedUB > const &ub) | |
| virtual | ~Constraint () |
| virtual void | eval (const Eigen::Ref< const Drake::TaylorVecXd > &x, Drake::TaylorVecXd &y) const =0 |
| Eigen::VectorXd const & | lower_bound () const |
| Eigen::VectorXd const & | upper_bound () const |
| size_t | num_constraints () const |
Additional Inherited Members | |
| Protected Attributes inherited from Constraint | |
| Eigen::VectorXd | lower_bound_ |
| Eigen::VectorXd | upper_bound_ |
|
inline |
All pointers are aliased for the lifetime of the wrapper.
Also, the wrapped QuasiStaticConstraint claims to have three constraints, but the third was handled differently in the original SNOPT implementation, which we won't try to reproduce here.

|
inlinevirtual |
|
inlineoverridevirtual |
Implements Constraint.
|
inlineoverride |
 1.8.11
1.8.11 
