|
Drake
|
|
Drake
|
Classes | |
| class | KinematicsCacheHelper |
| Helper class to avoid recalculating a kinematics cache which is going to be used repeatedly by multiple other classes. More... | |
| class | QuasiStaticConstraintWrapper |
| class | SingleTimeKinematicConstraintWrapper |
Functions | |
| template<typename DerivedA , typename DerivedB , typename DerivedC , typename DerivedD , typename DerivedE > | |
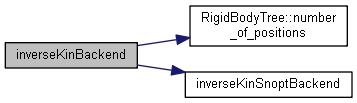
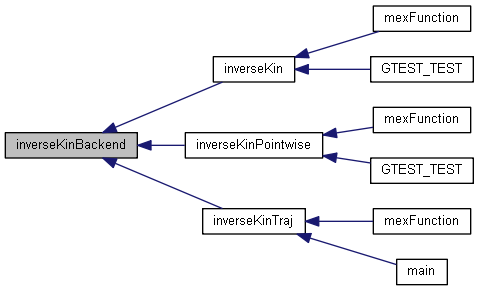
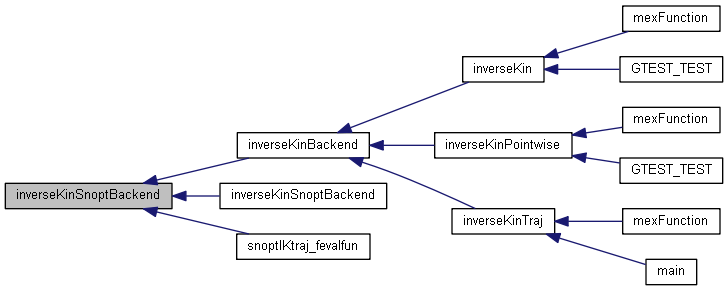
| void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< DerivedA > &q_seed, const MatrixBase< DerivedB > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< DerivedC > *q_sol, MatrixBase< DerivedD > *qdot_sol, MatrixBase< DerivedE > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< MatrixXd >> &q_seed, const MatrixBase< Map< MatrixXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< MatrixXd >> *q_sol, MatrixBase< Map< MatrixXd >> *qdot_sol, MatrixBase< Map< MatrixXd >> *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< MatrixXd > &q_seed, const MatrixBase< MatrixXd > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< MatrixXd > *q_sol, MatrixBase< MatrixXd > *qdot_sol, MatrixBase< MatrixXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< MatrixXd >> &q_seed, const MatrixBase< Map< MatrixXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< MatrixXd >> *q_sol, MatrixBase< MatrixXd > *qdot_sol, MatrixBase< MatrixXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< VectorXd >> &q_seed, const MatrixBase< Map< VectorXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< VectorXd >> *q_sol, MatrixBase< Map< VectorXd >> *qdot_sol, MatrixBase< Map< VectorXd >> *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< VectorXd > &q_seed, const MatrixBase< VectorXd > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< VectorXd > *q_sol, MatrixBase< VectorXd > *qdot_sol, MatrixBase< VectorXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< VectorXd >> &q_seed, const MatrixBase< Map< VectorXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< VectorXd >> *q_sol, MatrixBase< VectorXd > *qdot_sol, MatrixBase< VectorXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template<typename DerivedA , typename DerivedB , typename DerivedC , typename DerivedD , typename DerivedE > | |
| void | inverseKinBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const Eigen::MatrixBase< DerivedA > &q_seed, const Eigen::MatrixBase< DerivedB > &q_nom, int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, Eigen::MatrixBase< DerivedC > *q_sol, Eigen::MatrixBase< DerivedD > *qdot_sol, Eigen::MatrixBase< DerivedE > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| This function is primarily documented through RigidBodyIK.h. More... | |
| template<typename DerivedA , typename DerivedB , typename DerivedC , typename DerivedD , typename DerivedE > | |
| void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const Eigen::MatrixBase< DerivedA > &q_seed, const Eigen::MatrixBase< DerivedB > &q_nom, int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, Eigen::MatrixBase< DerivedC > *q_sol, Eigen::MatrixBase< DerivedD > *qdot_sol, Eigen::MatrixBase< DerivedE > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template<typename DerivedA , typename DerivedB , typename DerivedC , typename DerivedD , typename DerivedE > | |
| void | inverseKinSnoptBackend (RigidBodyTree *model_input, const int mode, const int nT_input, const double *t_input, const MatrixBase< DerivedA > &q_seed, const MatrixBase< DerivedB > &q_nom_input, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< DerivedC > *q_sol, MatrixBase< DerivedD > *qdot_sol, MatrixBase< DerivedE > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< MatrixXd >> &q_seed, const MatrixBase< Map< MatrixXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< MatrixXd >> *q_sol, MatrixBase< Map< MatrixXd >> *qdot_sol, MatrixBase< Map< MatrixXd >> *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< MatrixXd > &q_seed, const MatrixBase< MatrixXd > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< MatrixXd > *q_sol, MatrixBase< MatrixXd > *qdot_sol, MatrixBase< MatrixXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< MatrixXd >> &q_seed, const MatrixBase< Map< MatrixXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< MatrixXd >> *q_sol, MatrixBase< MatrixXd > *qdot_sol, MatrixBase< MatrixXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< VectorXd >> &q_seed, const MatrixBase< Map< VectorXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< VectorXd >> *q_sol, MatrixBase< Map< VectorXd >> *qdot_sol, MatrixBase< Map< VectorXd >> *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< VectorXd > &q_seed, const MatrixBase< VectorXd > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< VectorXd > *q_sol, MatrixBase< VectorXd > *qdot_sol, MatrixBase< VectorXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| template void | inverseKinSnoptBackend (RigidBodyTree *model, const int mode, const int nT, const double *t, const MatrixBase< Map< VectorXd >> &q_seed, const MatrixBase< Map< VectorXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< VectorXd >> *q_sol, MatrixBase< VectorXd > *qdot_sol, MatrixBase< VectorXd > *qddot_sol, int *INFO, std::vector< std::string > *infeasible_constraint) |
| static void | gevalNumerical (void(*func_ptr)(const VectorXd &, VectorXd &), const VectorXd &x, VectorXd &c, MatrixXd &dc, int order=2) |
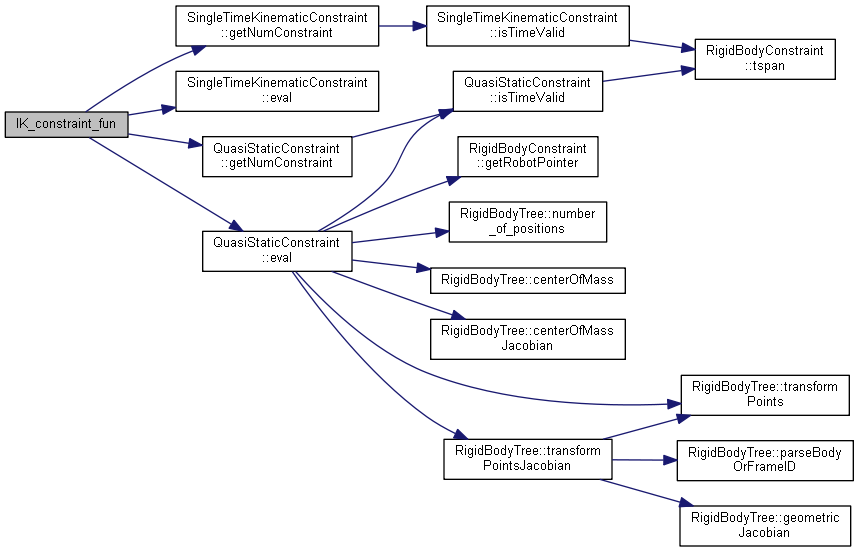
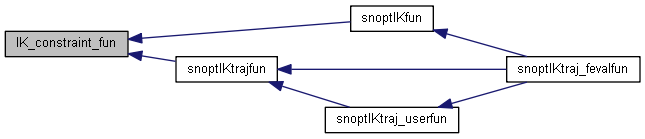
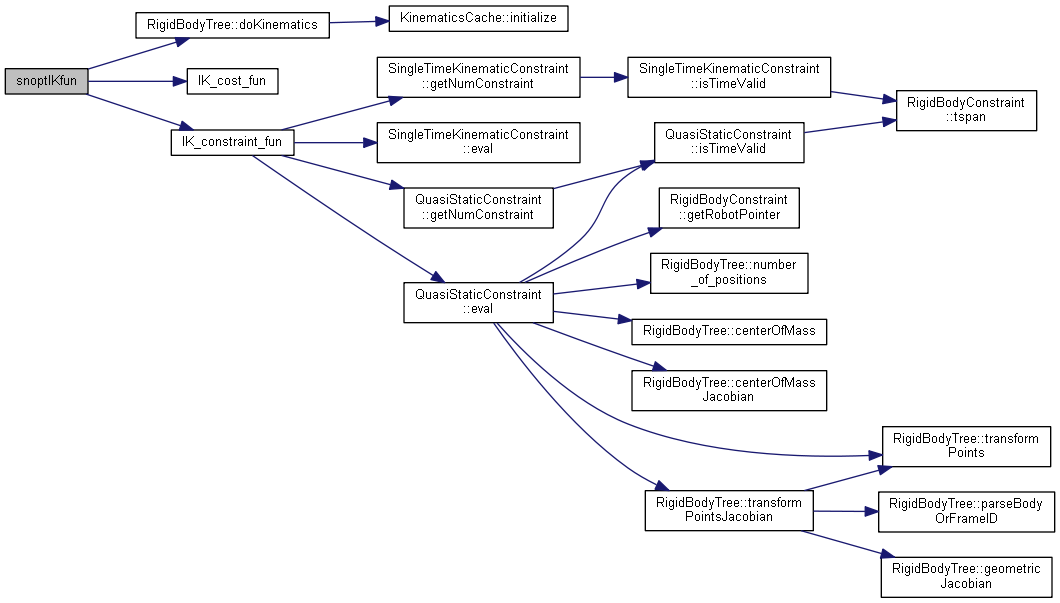
| static void | IK_constraint_fun (KinematicsCache< double > &cache, double *x, double *c, double *G) |
| static void | IK_cost_fun (double *x, double &J, double *dJ) |
| static int | snoptIKfun (snopt::integer *Status, snopt::integer *n, snopt::doublereal x[], snopt::integer *needF, snopt::integer *neF, snopt::doublereal F[], snopt::integer *needG, snopt::integer *neG, snopt::doublereal G[], char *cu, snopt::integer *lencu, snopt::integer iu[], snopt::integer *leniu, snopt::doublereal ru[], snopt::integer *lenru) |
| static void | IKtraj_cost_fun (MatrixXd q, const VectorXd &qdot0, const VectorXd &qdotf, double &J, double *dJ) |
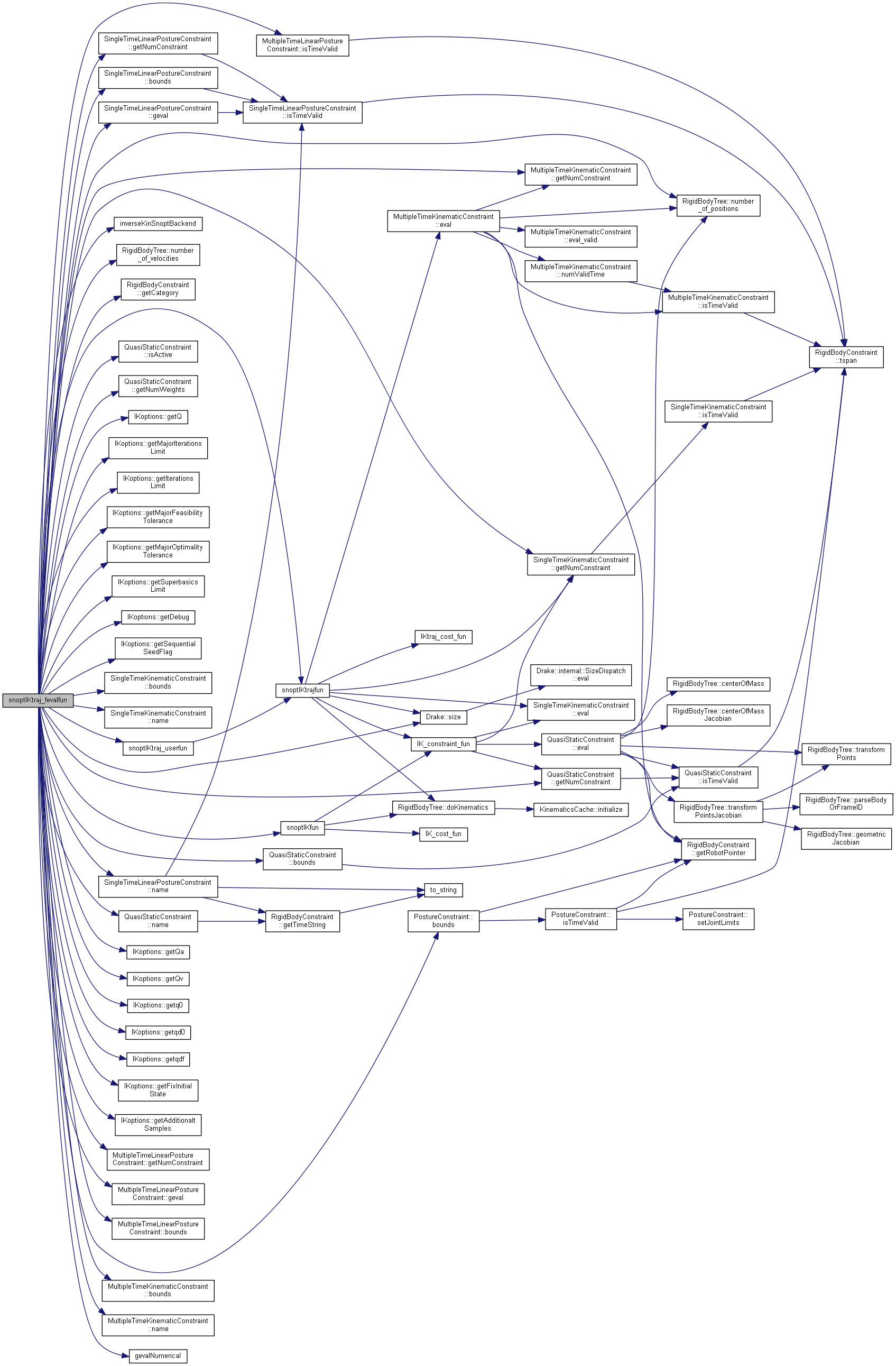
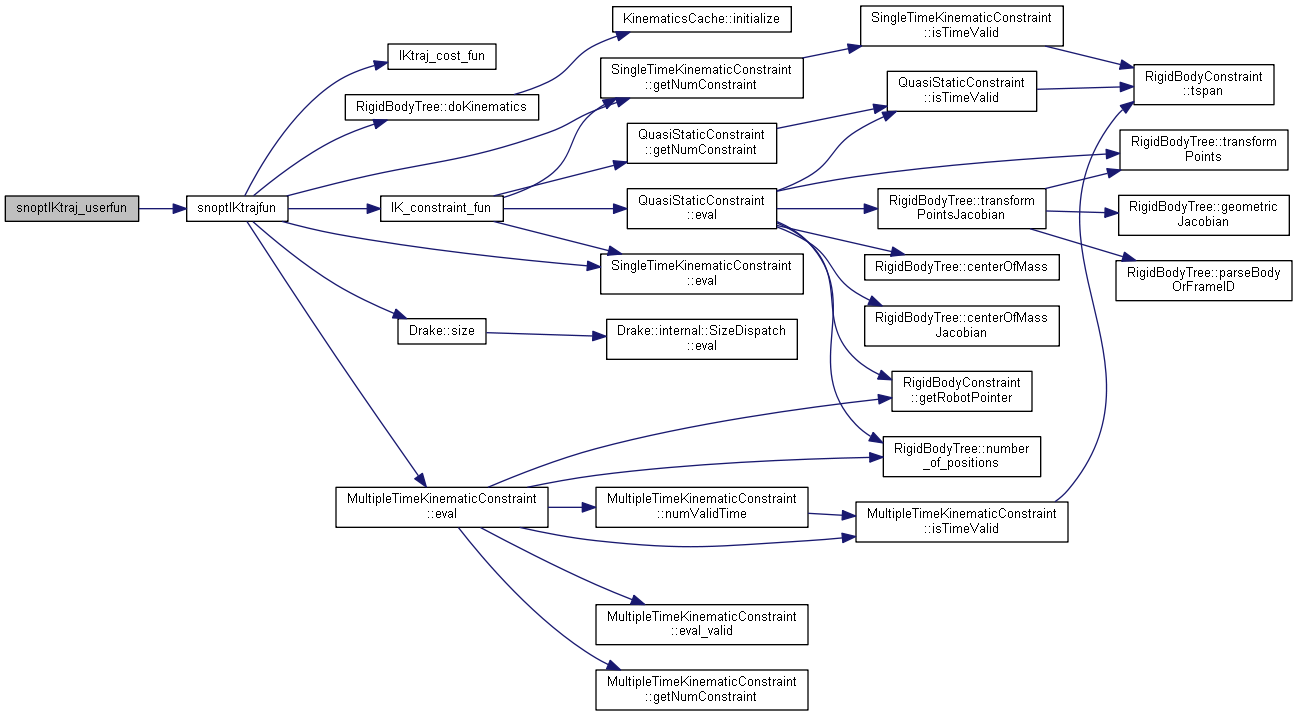
| static int | snoptIKtrajfun (snopt::integer *Status, snopt::integer *n, snopt::doublereal x[], snopt::integer *needF, snopt::integer *neF, snopt::doublereal F[], snopt::integer *needG, snopt::integer *neG, snopt::doublereal G[], char *cu, snopt::integer *lencu, snopt::integer iu[], snopt::integer *leniu, snopt::doublereal ru[], snopt::integer *lenru) |
| static void | snoptIKtraj_userfun (const VectorXd &x_vec, VectorXd &c_vec, VectorXd &G_vec) |
| static void | snoptIKtraj_fevalfun (const VectorXd &x, VectorXd &c) |
Variables | |
| static unique_ptr< snopt::doublereal[]> | rw |
| static unique_ptr< snopt::integer[]> | iw |
| static unique_ptr< char[]> | cw |
| static snopt::integer | lenrw = 0 |
| static snopt::integer | leniw = 0 |
| static snopt::integer | lencw = 0 |
| static RigidBodyTree * | model = nullptr |
| static SingleTimeKinematicConstraint ** | st_kc_array = nullptr |
| static MultipleTimeKinematicConstraint ** | mt_kc_array = nullptr |
| static QuasiStaticConstraint * | qsc_ptr = nullptr |
| static MatrixXd | q_nom |
| static VectorXd | q_nom_i |
| static MatrixXd | Q |
| static MatrixXd | Qa |
| static MatrixXd | Qv |
| static bool | qscActiveFlag |
| static snopt::integer | nx |
| static snopt::integer | nF |
| static snopt::integer | nG |
| static snopt::integer * | nc_array |
| static snopt::integer * | nG_array |
| static snopt::integer * | nA_array |
| static int | nq |
| static int | nv |
| static double * | t = nullptr |
| static double * | t_samples = nullptr |
| static double * | ti = nullptr |
| static int | num_st_kc |
| static int | num_mt_kc |
| static int | num_st_lpc |
| static int | num_mt_lpc |
| static int * | mt_kc_nc |
| static int * | st_lpc_nc |
| static int * | mt_lpc_nc |
| static int | nT |
| static int | num_qsc_pts |
| static bool | fixInitialState |
| static snopt::integer * | qfree_idx |
| static snopt::integer * | qdotf_idx |
| static snopt::integer * | qdot0_idx |
| static VectorXd | q0_fixed |
| static VectorXd | qdot0_fixed |
| static snopt::integer | qstart_idx |
| static snopt::integer | num_qfree |
| static snopt::integer | num_qdotfree |
| static MatrixXd | velocity_mat |
| static MatrixXd | velocity_mat_qd0 |
| static MatrixXd | velocity_mat_qdf |
| static MatrixXd | accel_mat |
| static MatrixXd | accel_mat_qd0 |
| static MatrixXd | accel_mat_qdf |
| static VectorXd * | t_inbetween |
| static snopt::integer | num_inbetween_tSamples |
| static MatrixXd * | dqInbetweendqknot |
| static MatrixXd * | dqInbetweendqd0 |
| static MatrixXd * | dqInbetweendqdf |
| static snopt::integer * | qknot_qsamples_idx |
| static snopt::integer | nF_tmp |
| static snopt::integer | nG_tmp |
| static snopt::integer | nx_tmp |
|
static |

|
static |

|
static |

| void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const Eigen::MatrixBase< DerivedA > & | q_seed, | ||
| const Eigen::MatrixBase< DerivedB > & | q_nom, | ||
| int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| Eigen::MatrixBase< DerivedC > * | q_sol, | ||
| Eigen::MatrixBase< DerivedD > * | qdot_sol, | ||
| Eigen::MatrixBase< DerivedE > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
This function is primarily documented through RigidBodyIK.h.
All parameters are passthroughs from there.
| void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< DerivedA > & | q_seed, | ||
| const MatrixBase< DerivedB > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< DerivedC > * | q_sol, | ||
| MatrixBase< DerivedD > * | qdot_sol, | ||
| MatrixBase< DerivedE > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< MatrixXd >> & | q_seed, | ||
| const MatrixBase< Map< MatrixXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< MatrixXd >> * | q_sol, | ||
| MatrixBase< Map< MatrixXd >> * | qdot_sol, | ||
| MatrixBase< Map< MatrixXd >> * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< MatrixXd > & | q_seed, | ||
| const MatrixBase< MatrixXd > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< MatrixXd > * | q_sol, | ||
| MatrixBase< MatrixXd > * | qdot_sol, | ||
| MatrixBase< MatrixXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< MatrixXd >> & | q_seed, | ||
| const MatrixBase< Map< MatrixXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< MatrixXd >> * | q_sol, | ||
| MatrixBase< MatrixXd > * | qdot_sol, | ||
| MatrixBase< MatrixXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< VectorXd >> & | q_seed, | ||
| const MatrixBase< Map< VectorXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< VectorXd >> * | q_sol, | ||
| MatrixBase< Map< VectorXd >> * | qdot_sol, | ||
| MatrixBase< Map< VectorXd >> * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< VectorXd > & | q_seed, | ||
| const MatrixBase< VectorXd > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< VectorXd > * | q_sol, | ||
| MatrixBase< VectorXd > * | qdot_sol, | ||
| MatrixBase< VectorXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void Drake::systems::plants::inverseKinBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< VectorXd >> & | q_seed, | ||
| const MatrixBase< Map< VectorXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< VectorXd >> * | q_sol, | ||
| MatrixBase< VectorXd > * | qdot_sol, | ||
| MatrixBase< VectorXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| void inverseKinSnoptBackend | ( | RigidBodyTree * | model_input, |
| const int | mode, | ||
| const int | nT_input, | ||
| const double * | t_input, | ||
| const MatrixBase< DerivedA > & | q_seed, | ||
| const MatrixBase< DerivedB > & | q_nom_input, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< DerivedC > * | q_sol, | ||
| MatrixBase< DerivedD > * | qdot_sol, | ||
| MatrixBase< DerivedE > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |

| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< MatrixXd >> & | q_seed, | ||
| const MatrixBase< Map< MatrixXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< MatrixXd >> * | q_sol, | ||
| MatrixBase< Map< MatrixXd >> * | qdot_sol, | ||
| MatrixBase< Map< MatrixXd >> * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| void Drake::systems::plants::inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const Eigen::MatrixBase< DerivedA > & | q_seed, | ||
| const Eigen::MatrixBase< DerivedB > & | q_nom, | ||
| int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| Eigen::MatrixBase< DerivedC > * | q_sol, | ||
| Eigen::MatrixBase< DerivedD > * | qdot_sol, | ||
| Eigen::MatrixBase< DerivedE > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< MatrixXd > & | q_seed, | ||
| const MatrixBase< MatrixXd > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< MatrixXd > * | q_sol, | ||
| MatrixBase< MatrixXd > * | qdot_sol, | ||
| MatrixBase< MatrixXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< MatrixXd >> & | q_seed, | ||
| const MatrixBase< Map< MatrixXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< MatrixXd >> * | q_sol, | ||
| MatrixBase< MatrixXd > * | qdot_sol, | ||
| MatrixBase< MatrixXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< VectorXd >> & | q_seed, | ||
| const MatrixBase< Map< VectorXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< VectorXd >> * | q_sol, | ||
| MatrixBase< Map< VectorXd >> * | qdot_sol, | ||
| MatrixBase< Map< VectorXd >> * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< VectorXd > & | q_seed, | ||
| const MatrixBase< VectorXd > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< VectorXd > * | q_sol, | ||
| MatrixBase< VectorXd > * | qdot_sol, | ||
| MatrixBase< VectorXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
| template void inverseKinSnoptBackend | ( | RigidBodyTree * | model, |
| const int | mode, | ||
| const int | nT, | ||
| const double * | t, | ||
| const MatrixBase< Map< VectorXd >> & | q_seed, | ||
| const MatrixBase< Map< VectorXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< VectorXd >> * | q_sol, | ||
| MatrixBase< VectorXd > * | qdot_sol, | ||
| MatrixBase< VectorXd > * | qddot_sol, | ||
| int * | INFO, | ||
| std::vector< std::string > * | infeasible_constraint | ||
| ) |
|
static |

|
static |
|
static |

|
static |

|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
 1.8.11
1.8.11 
