|
Drake
|
|
Drake
|
base class. More...
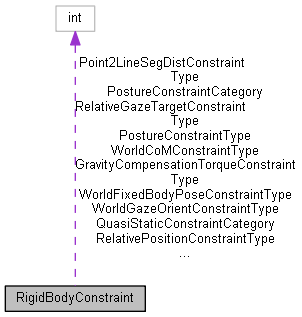
#include <drake/systems/plants/constraint/RigidBodyConstraint.h>
Public Member Functions | |
| RigidBodyConstraint (int category, RigidBodyTree *robot, const Eigen::Vector2d &tspan=DrakeRigidBodyConstraint::default_tspan) | |
| int | getType () const |
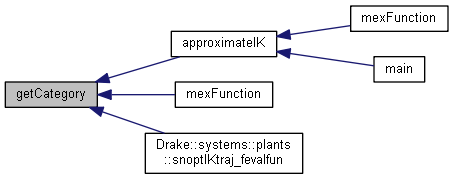
| int | getCategory () const |
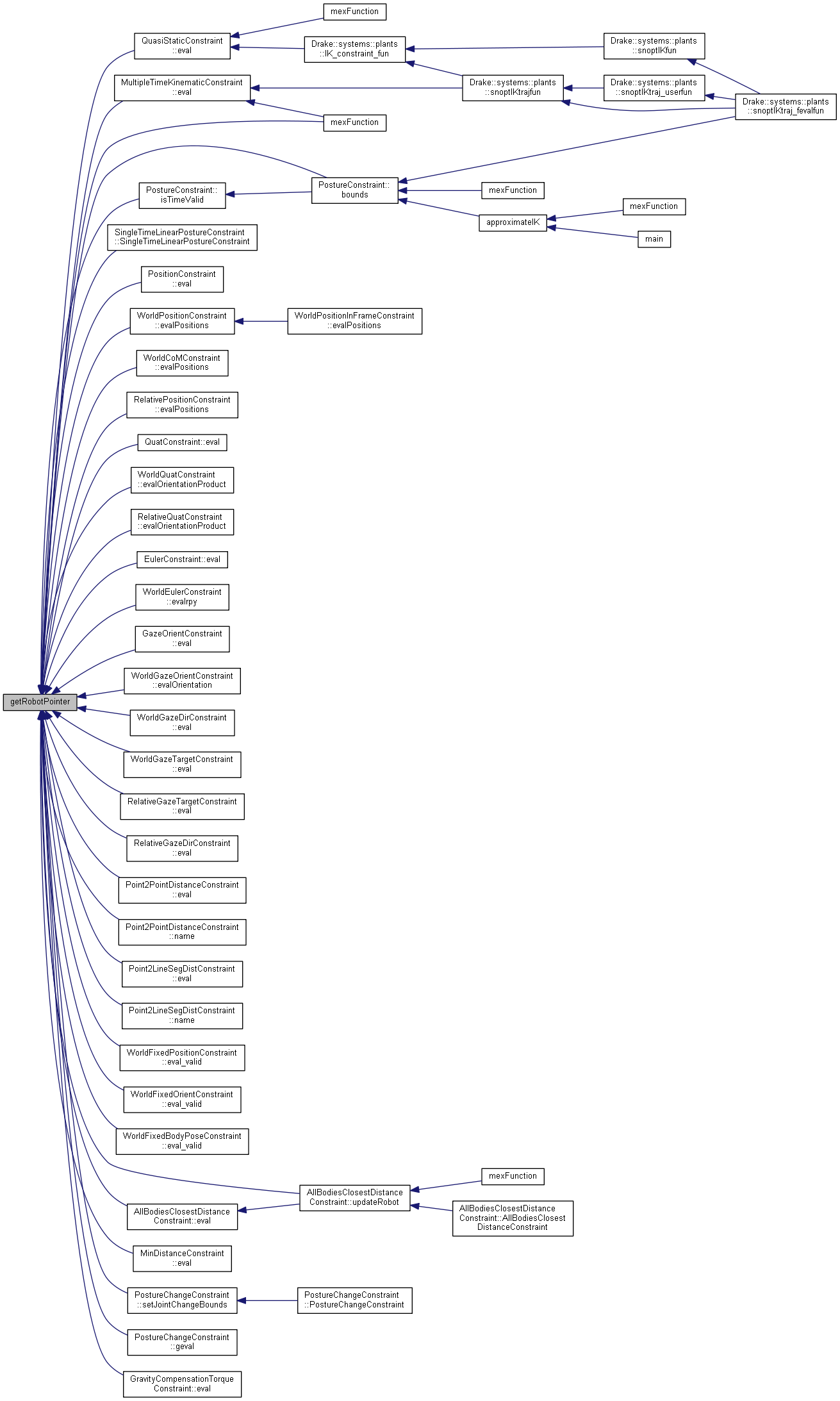
| RigidBodyTree * | getRobotPointer () const |
| virtual | ~RigidBodyConstraint (void)=0 |
Protected Member Functions | |
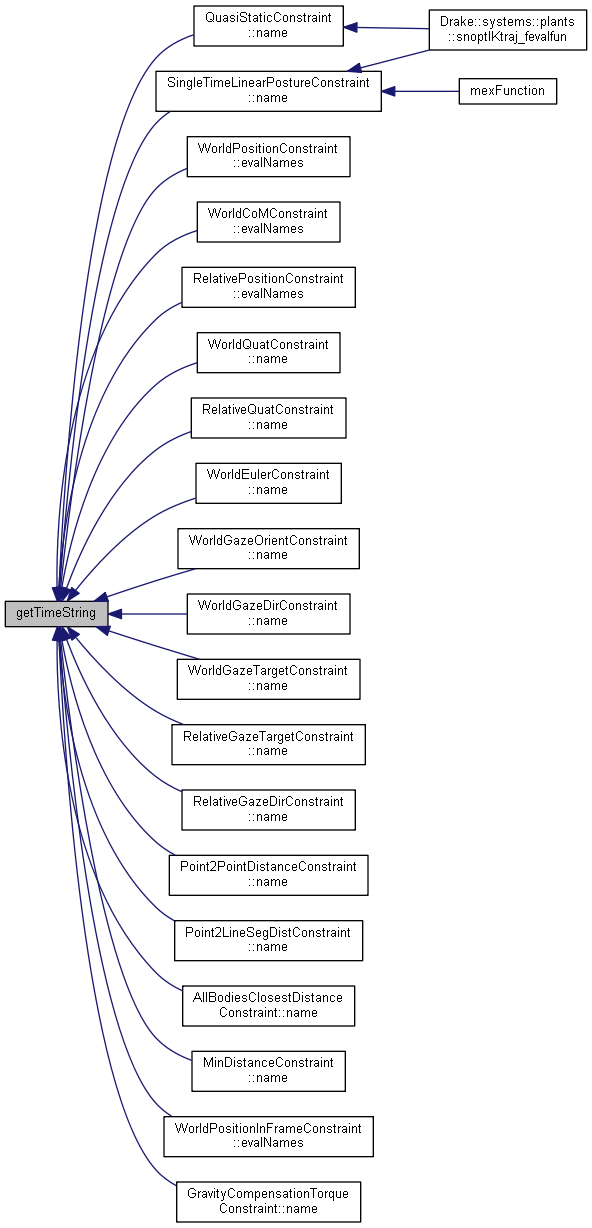
| std::string | getTimeString (const double *t) const |
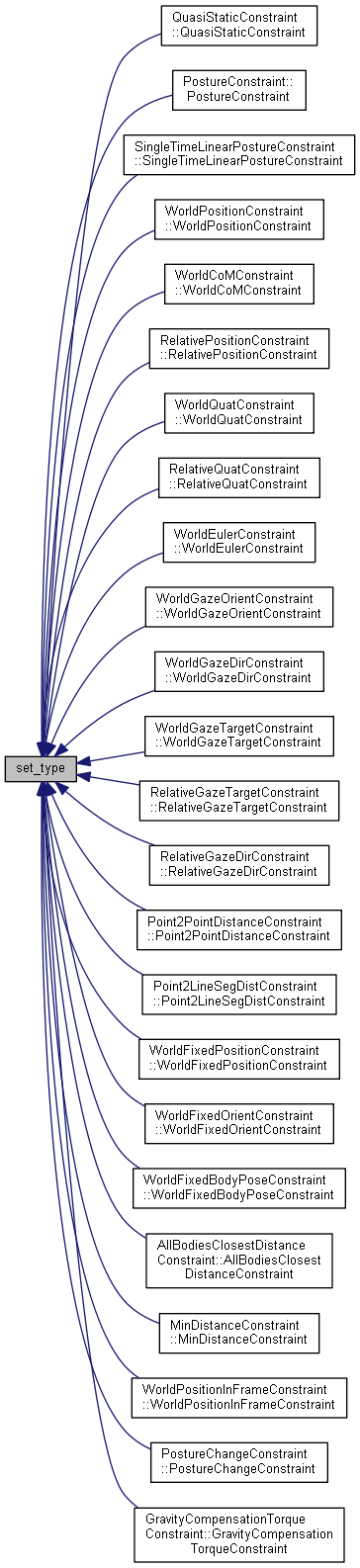
| void | set_type (int type) |
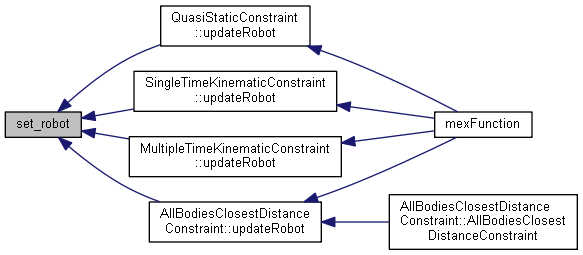
| void | set_robot (RigidBodyTree *robot) |
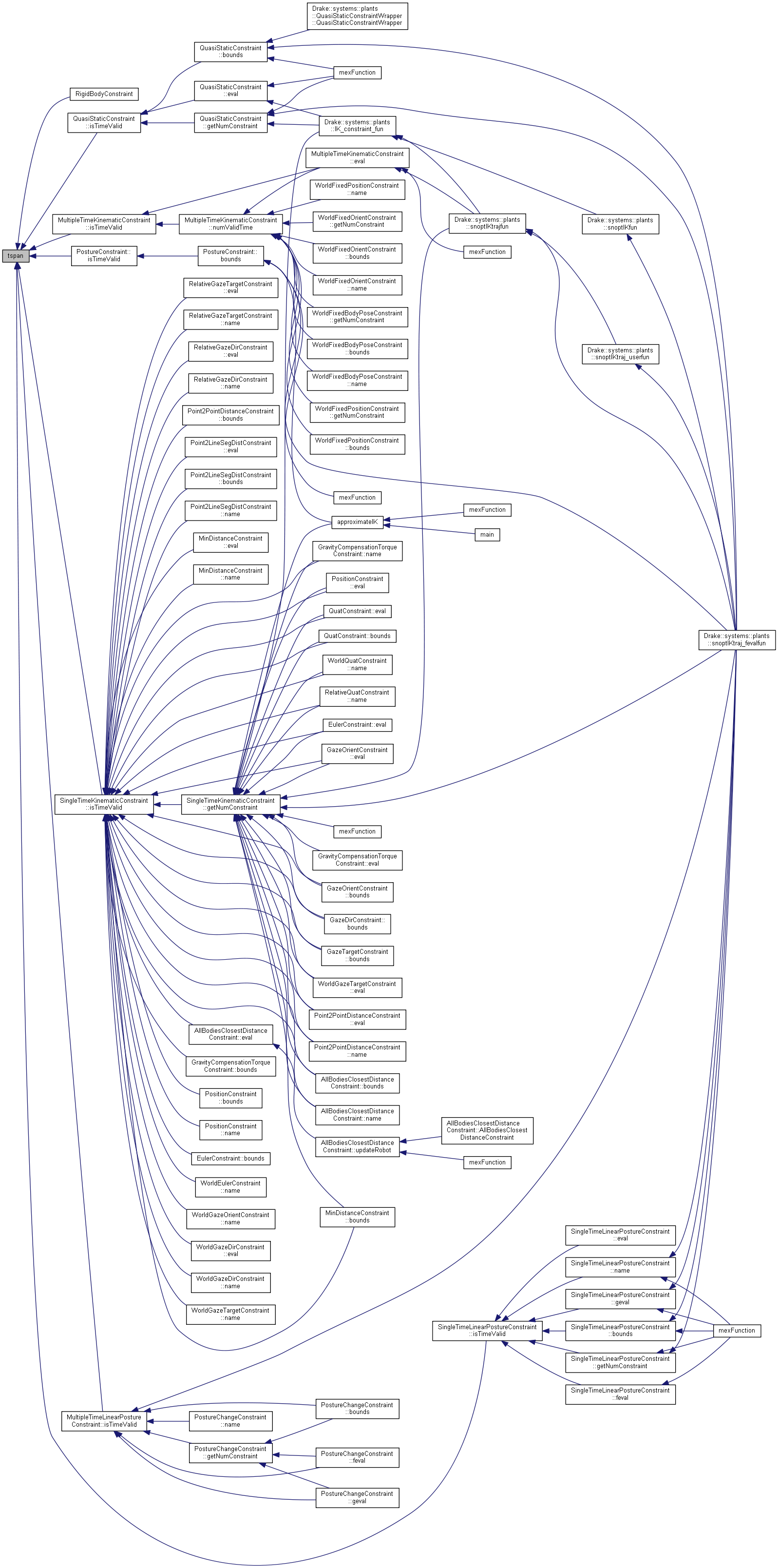
| const double * | tspan () const |
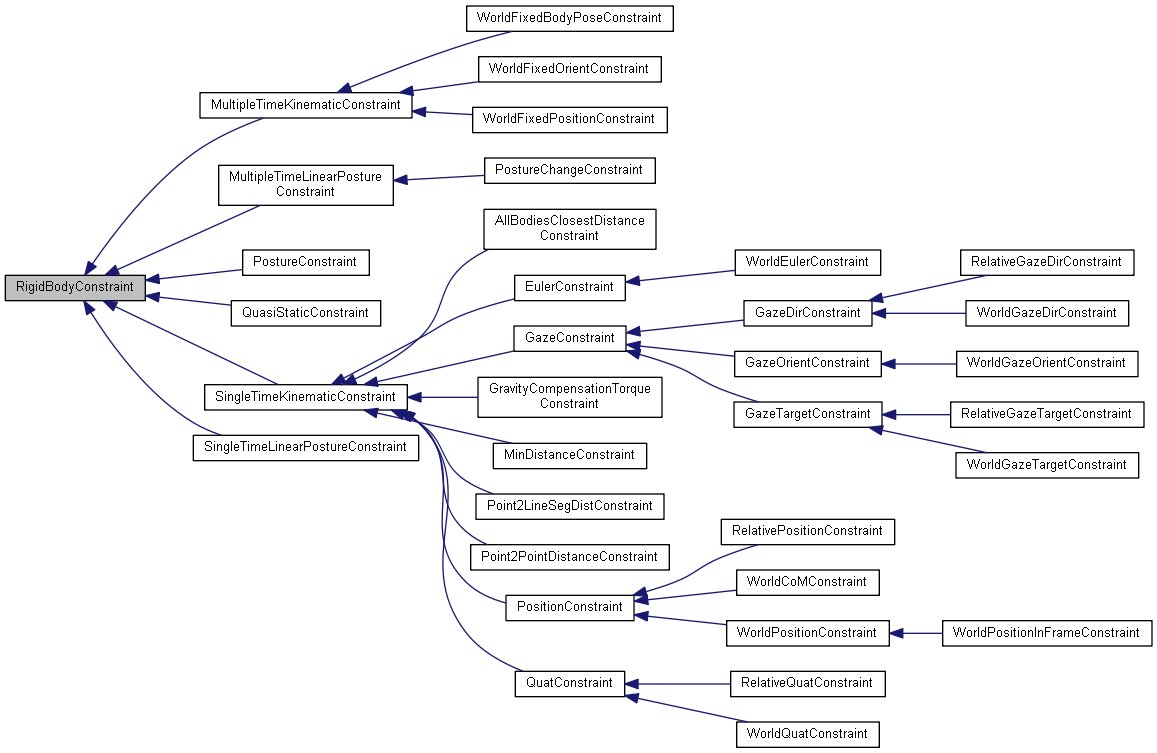
base class.
All constraints used in the inverse kinematics problem are inherited from RigidBodyConstraint. There are 6 main categories of the RigidBodyConstraint, each category has its own interface
| RigidBodyConstraint | ( | int | category, |
| RigidBodyTree * | robot, | ||
| const Eigen::Vector2d & | tspan = DrakeRigidBodyConstraint::default_tspan |
||
| ) |

|
pure virtual |
|
inline |
|
inline |
|
protected |

|
inline |

|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
 1.8.11
1.8.11 
