|
Drake
|
|
Drake
|
#include "drake/systems/plants/RigidBodyIK.h"#include "drake/systems/plants/RigidBodyTree.h"#include "inverseKinBackend.h"
Functions | |
| template<typename DerivedA , typename DerivedB , typename DerivedC > | |
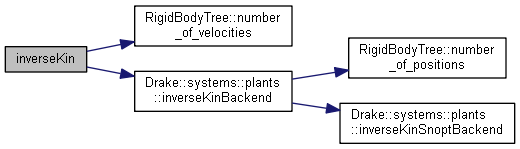
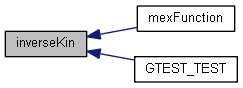
| DRAKEIK_EXPORT void | inverseKin (RigidBodyTree *model, const MatrixBase< DerivedA > &q_seed, const MatrixBase< DerivedB > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< DerivedC > *q_sol, int *INFO, vector< string > *infeasible_constraint) |
| template DRAKEIK_EXPORT void | inverseKin (RigidBodyTree *model, const MatrixBase< VectorXd > &q_seed, const MatrixBase< VectorXd > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< VectorXd > *q_sol, int *INFO, vector< string > *infeasible_constraint) |
| template DRAKEIK_EXPORT void | inverseKin (RigidBodyTree *model, const MatrixBase< Map< VectorXd >> &q_seed, const MatrixBase< Map< VectorXd >> &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< Map< VectorXd >> *q_sol, int *INFO, vector< string > *infeasible_constraint) |
| IKResults | inverseKinSimple (RigidBodyTree *model, const Eigen::VectorXd &q_seed, const Eigen::VectorXd &q_nom, const std::vector< RigidBodyConstraint * > &constraint_array, const IKoptions &ikoptions) |
| DRAKEIK_EXPORT void inverseKin | ( | RigidBodyTree * | model, |
| const MatrixBase< DerivedA > & | q_seed, | ||
| const MatrixBase< DerivedB > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< DerivedC > * | q_sol, | ||
| int * | INFO, | ||
| vector< string > * | infeasible_constraint | ||
| ) |
| template DRAKEIK_EXPORT void inverseKin | ( | RigidBodyTree * | model, |
| const MatrixBase< VectorXd > & | q_seed, | ||
| const MatrixBase< VectorXd > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< VectorXd > * | q_sol, | ||
| int * | INFO, | ||
| vector< string > * | infeasible_constraint | ||
| ) |
| template DRAKEIK_EXPORT void inverseKin | ( | RigidBodyTree * | model, |
| const MatrixBase< Map< VectorXd >> & | q_seed, | ||
| const MatrixBase< Map< VectorXd >> & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< Map< VectorXd >> * | q_sol, | ||
| int * | INFO, | ||
| vector< string > * | infeasible_constraint | ||
| ) |
| IKResults inverseKinSimple | ( | RigidBodyTree * | model, |
| const Eigen::VectorXd & | q_seed, | ||
| const Eigen::VectorXd & | q_nom, | ||
| const std::vector< RigidBodyConstraint * > & | constraint_array, | ||
| const IKoptions & | ikoptions | ||
| ) |

 1.8.11
1.8.11 
