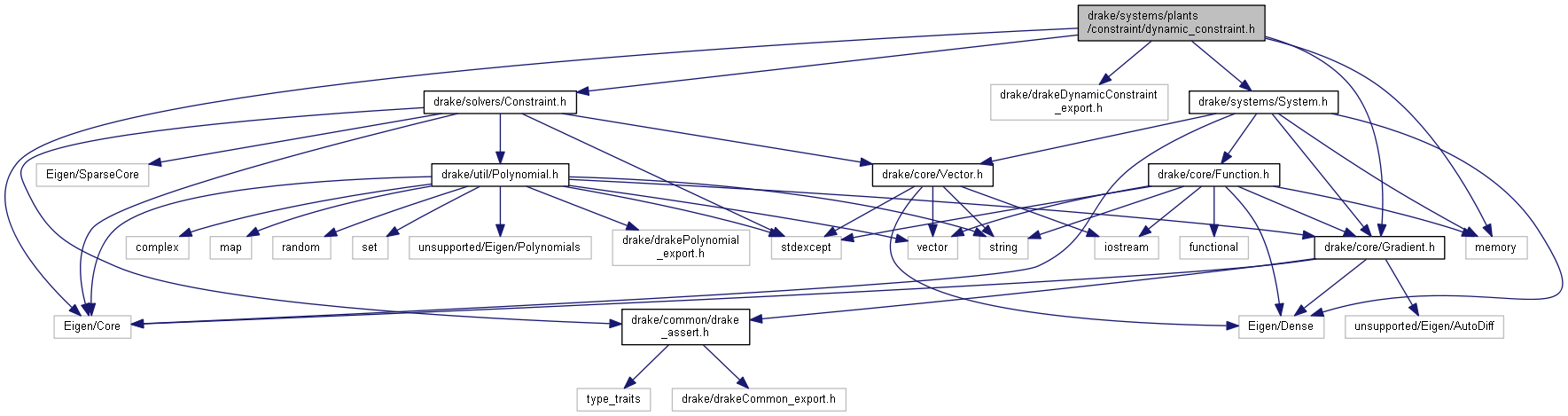
#include <memory>
#include <Eigen/Core>
#include <drake/drakeDynamicConstraint_export.h>
#include <drake/core/Gradient.h>
#include <drake/solvers/Constraint.h>
#include <drake/systems/System.h>
Go to the source code of this file.
|
| class | DynamicConstraint |
| | Provides a base implementation and interface for a dynamic constraint (which is intended to be used with trajectory optimization, but is not specific to that purpose). More...
|
| |
| class | SystemDynamicConstraint< System > |
| | Implements a dynamic constraint which uses the dynamics function of a system. More...
|
| |
 1.8.11
1.8.11 
