|
Drake
|
|
Drake
|
RigidBodyMagnetometer. More...
#include <drake/systems/plants/RigidBodySystem.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | RigidBodyMagnetometer (RigidBodySystem const &sys, const std::string &name, const std::shared_ptr< RigidBodyFrame > frame, double declination) |
| ~RigidBodyMagnetometer () override | |
| size_t | getNumOutputs () const override |
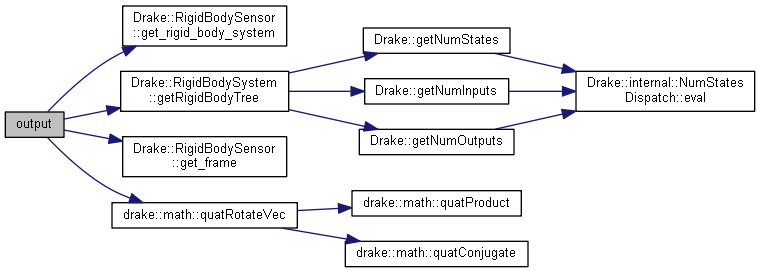
| Eigen::VectorXd | output (const double &t, const KinematicsCache< double > &rigid_body_state, const RigidBodySystem::InputVector< double > &u) const override |
| void | setNoiseModel (std::shared_ptr< NoiseModel< double, 3, Eigen::Vector3d >> model) |
| void | setDeclination (double magnetic_declination) |
 Public Member Functions inherited from RigidBodySensor Public Member Functions inherited from RigidBodySensor | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | RigidBodySensor (const RigidBodySystem &sys, const std::string &name, std::shared_ptr< RigidBodyFrame > frame) |
| The constructor. More... | |
| virtual | ~RigidBodySensor () |
| virtual bool | isDirectFeedthrough () const |
| const std::string & | get_name () const |
| Returns the name of the sensor. More... | |
| const std::string & | get_model_name () const |
| Returns the name of the model (i.e., robot) that owns this sensor. More... | |
| const RigidBodyFrame & | get_frame () const |
| Returns the frame to which thi sensor is attached. More... | |
| const RigidBodySystem & | get_rigid_body_system () const |
| Returns the rigid body system to which this sensor attaches. More... | |
Simulates a sensor that measures magnetic fields
| RigidBodyMagnetometer | ( | RigidBodySystem const & | sys, |
| const std::string & | name, | ||
| const std::shared_ptr< RigidBodyFrame > | frame, | ||
| double | declination | ||
| ) |

|
inlineoverride |
|
inlineoverridevirtual |
Reimplemented from RigidBodySensor.
|
overridevirtual |
|
inline |


|
inline |
 1.8.11
1.8.11