|
Drake
|
|
Drake
|
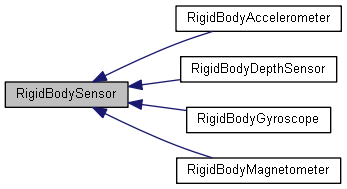
An abstract parent class of all sensors. More...
#include <drake/systems/plants/RigidBodySystem.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | RigidBodySensor (const RigidBodySystem &sys, const std::string &name, std::shared_ptr< RigidBodyFrame > frame) |
| The constructor. More... | |
| virtual | ~RigidBodySensor () |
| virtual bool | isDirectFeedthrough () const |
| virtual size_t | getNumOutputs () const |
| virtual Eigen::VectorXd | output (const double &t, const KinematicsCache< double > &rigid_body_state, const RigidBodySystem::InputVector< double > &u) const =0 |
| const std::string & | get_name () const |
| Returns the name of the sensor. More... | |
| const std::string & | get_model_name () const |
| Returns the name of the model (i.e., robot) that owns this sensor. More... | |
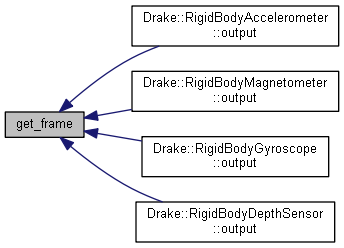
| const RigidBodyFrame & | get_frame () const |
| Returns the frame to which thi sensor is attached. More... | |
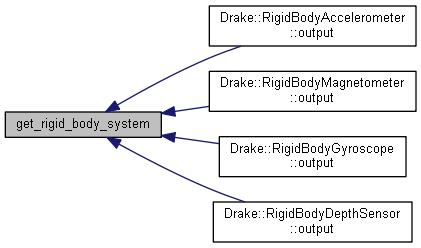
| const RigidBodySystem & | get_rigid_body_system () const |
| Returns the rigid body system to which this sensor attaches. More... | |
An abstract parent class of all sensors.
This is an abstract top-level class of all rigid body sensors in Drake.
|
inline |
The constructor.
| [in] | sys | The rigid body system to which the sensor is attached. |
| [in] | name | The name of the sensor. |
| [in] | frame | The frame within the rigid body system's rigid body tree to which the sensor is attached. |
|
inlinevirtual |
| const RigidBodyFrame & get_frame | ( | ) | const |
Returns the frame to which thi sensor is attached.
| const std::string & get_model_name | ( | ) | const |
Returns the name of the model (i.e., robot) that owns this sensor.

|
inline |
Returns the name of the sensor.

| const RigidBodySystem & get_rigid_body_system | ( | ) | const |
Returns the rigid body system to which this sensor attaches.
|
inlinevirtual |
Reimplemented in RigidBodyMagnetometer, RigidBodyGyroscope, RigidBodyAccelerometer, and RigidBodyDepthSensor.
|
inlinevirtual |
Reimplemented in RigidBodyAccelerometer.
|
pure virtual |
Implemented in RigidBodyMagnetometer, RigidBodyGyroscope, RigidBodyAccelerometer, and RigidBodyDepthSensor.
 1.8.11
1.8.11 
