|
Drake
|
|
Drake
|
#include <map>#include <fstream>#include "yaml-cpp/yaml.h"#include "drake/systems/controllers/QPCommon.h"#include "drake/systems/plants/RigidBodyTree.h"
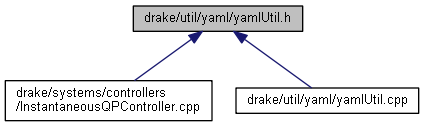
Go to the source code of this file.
Functions | |
| YAML::Node | applyDefaults (const YAML::Node &node, const YAML::Node &default_node) |
| YAML::Node | expandDefaults (const YAML::Node &node) |
| YAML::Node | get (const YAML::Node &parent, const std::string &key) |
| QPControllerParams | loadSingleParamSet (const YAML::Node &config, const RigidBodyTree &robot) |
| std::map< std::string, QPControllerParams > | loadAllParamSets (YAML::Node config, const RigidBodyTree &robot) |
| std::map< std::string, QPControllerParams > | loadAllParamSets (YAML::Node config, const RigidBodyTree &robot, std::ofstream &debug_output_file) |
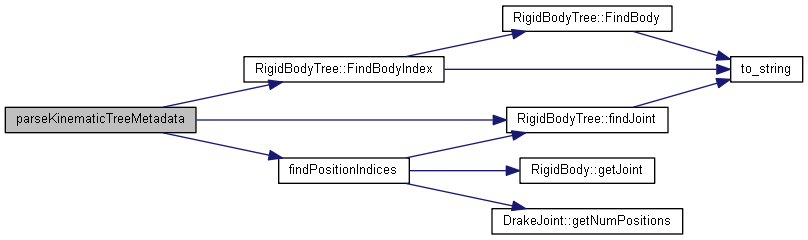
| RobotPropertyCache | parseKinematicTreeMetadata (const YAML::Node &metadata, const RigidBodyTree &robot) |
| KinematicModifications | parseKinematicModifications (const YAML::Node &mods) |
| YAML::Node applyDefaults | ( | const YAML::Node & | node, |
| const YAML::Node & | default_node | ||
| ) |

| YAML::Node expandDefaults | ( | const YAML::Node & | node | ) |
| YAML::Node get | ( | const YAML::Node & | parent, |
| const std::string & | key | ||
| ) |
| std::map<std::string, QPControllerParams> loadAllParamSets | ( | YAML::Node | config, |
| const RigidBodyTree & | robot | ||
| ) |

| std::map<std::string, QPControllerParams> loadAllParamSets | ( | YAML::Node | config, |
| const RigidBodyTree & | robot, | ||
| std::ofstream & | debug_output_file | ||
| ) |

| QPControllerParams loadSingleParamSet | ( | const YAML::Node & | config, |
| const RigidBodyTree & | robot | ||
| ) |


| KinematicModifications parseKinematicModifications | ( | const YAML::Node & | mods | ) |

| RobotPropertyCache parseKinematicTreeMetadata | ( | const YAML::Node & | metadata, |
| const RigidBodyTree & | robot | ||
| ) |
 1.8.11
1.8.11 
