|
Drake
|
|
Drake
|
#include <drake/solvers/IpoptSolver.h>
Public Member Functions | |
| bool | available () const override |
| Returns true iff this solver was enabled at compile-time. More... | |
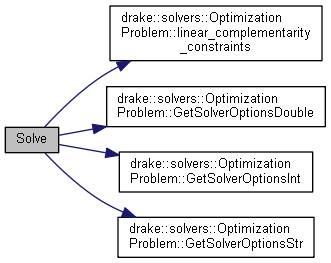
| SolutionResult | Solve (OptimizationProblem &prog) const override |
Sets values for the decision variables on the given OptimizationProblem prog, or: More... | |
 Public Member Functions inherited from MathematicalProgramSolverInterface Public Member Functions inherited from MathematicalProgramSolverInterface | |
| virtual | ~MathematicalProgramSolverInterface ()=default |
|
overridevirtual |
Returns true iff this solver was enabled at compile-time.
Implements MathematicalProgramSolverInterface.
|
overridevirtual |
Sets values for the decision variables on the given OptimizationProblem prog, or:
Implements MathematicalProgramSolverInterface.
 1.8.11
1.8.11 
