#include <drake/systems/plants/constraint/RigidBodyConstraint.h>
|
| | RelativePositionConstraint (RigidBodyTree *model, const Eigen::Matrix3Xd &pts, const Eigen::MatrixXd &lb, const Eigen::MatrixXd &ub, int bodyA_idx, int bodyB_idx, const Eigen::Matrix< double, 7, 1 > &bTbp, const Eigen::Vector2d &tspan) |
| |
| virtual | ~RelativePositionConstraint () |
| |
| | PositionConstraint (RigidBodyTree *model, const Eigen::Matrix3Xd &pts, Eigen::MatrixXd lb, Eigen::MatrixXd ub, const Eigen::Vector2d &tspan=DrakeRigidBodyConstraint::default_tspan) |
| |
| virtual | ~PositionConstraint (void) |
| |
| virtual void | eval (const double *t, KinematicsCache< double > &cache, Eigen::VectorXd &c, Eigen::MatrixXd &dc) const |
| |
| virtual void | bounds (const double *t, Eigen::VectorXd &lb, Eigen::VectorXd &ub) const |
| |
| virtual void | name (const double *t, std::vector< std::string > &name_str) const |
| |
| | SingleTimeKinematicConstraint (RigidBodyTree *model, const Eigen::Vector2d &tspan=DrakeRigidBodyConstraint::default_tspan) |
| |
| virtual | ~SingleTimeKinematicConstraint () |
| |
| bool | isTimeValid (const double *t) const |
| |
| int | getNumConstraint (const double *t) const |
| |
| virtual void | updateRobot (RigidBodyTree *robot) |
| |
 Public Member Functions inherited from RigidBodyConstraint Public Member Functions inherited from RigidBodyConstraint |
| | RigidBodyConstraint (int category, RigidBodyTree *robot, const Eigen::Vector2d &tspan=DrakeRigidBodyConstraint::default_tspan) |
| |
| int | getType () const |
| |
| int | getCategory () const |
| |
| RigidBodyTree * | getRobotPointer () const |
| |
| virtual | ~RigidBodyConstraint (void)=0 |
| |
| RelativePositionConstraint |
( |
RigidBodyTree * |
model, |
|
|
const Eigen::Matrix3Xd & |
pts, |
|
|
const Eigen::MatrixXd & |
lb, |
|
|
const Eigen::MatrixXd & |
ub, |
|
|
int |
bodyA_idx, |
|
|
int |
bodyB_idx, |
|
|
const Eigen::Matrix< double, 7, 1 > & |
bTbp, |
|
|
const Eigen::Vector2d & |
tspan |
|
) |
| |
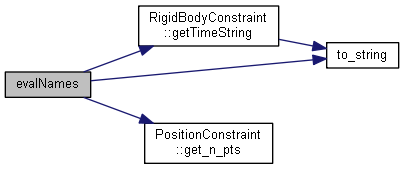
| void evalNames |
( |
const double * |
t, |
|
|
std::vector< std::string > & |
cnst_names |
|
) |
| const |
|
protectedvirtual |
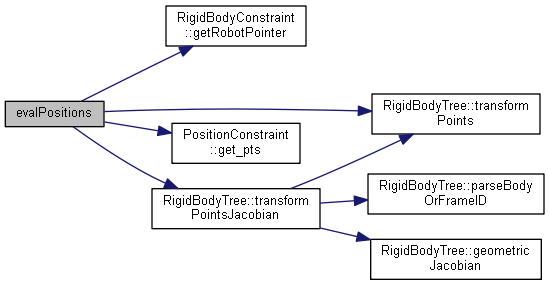
| void evalPositions |
( |
KinematicsCache< double > & |
cache, |
|
|
Eigen::Matrix3Xd & |
pos, |
|
|
Eigen::MatrixXd & |
J |
|
) |
| const |
|
protectedvirtual |
The documentation for this class was generated from the following files:
 1.8.11
1.8.11