|
Drake
|
|
Drake
|
#include "drake/systems/plants/RigidBodyIK.h"#include "drake/systems/plants/RigidBodyTree.h"#include "constraint/RigidBodyConstraint.h"#include "drake/systems/plants/IKoptions.h"#include <math.h>#include <set>#include <gurobi_c++.h>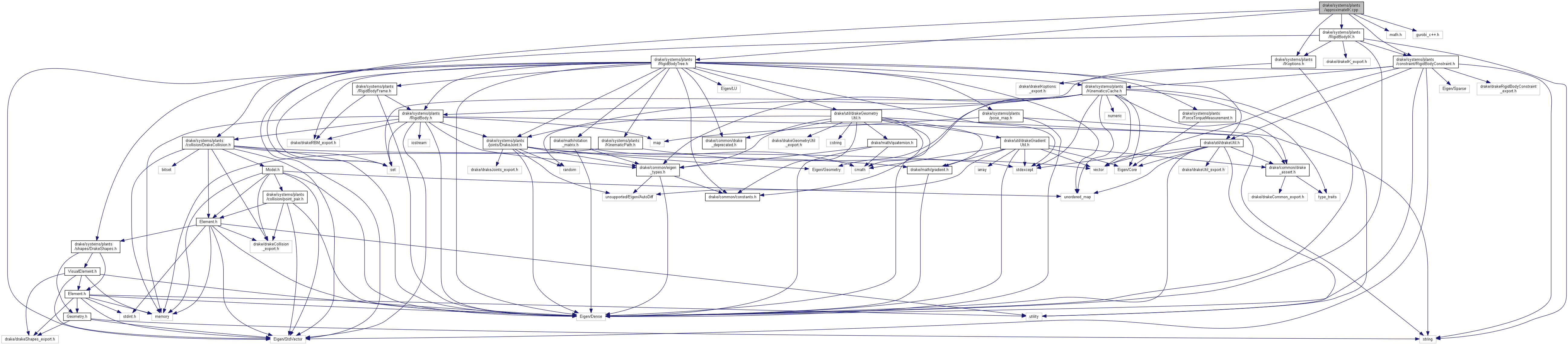
Functions | |
| template<typename DerivedA , typename DerivedB , typename DerivedC > | |
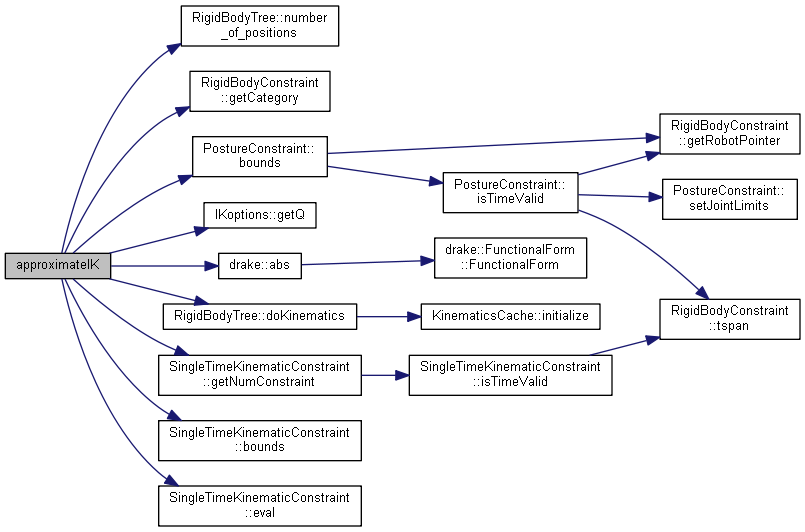
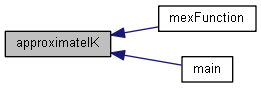
| void | approximateIK (RigidBodyTree *model, const MatrixBase< DerivedA > &q_seed, const MatrixBase< DerivedB > &q_nom, const int num_constraints, RigidBodyConstraint **const constraint_array, const IKoptions &ikoptions, MatrixBase< DerivedC > *q_sol, int *INFO) |
| template void | approximateIK (RigidBodyTree *, const MatrixBase< Map< VectorXd >> &, const MatrixBase< Map< VectorXd >> &, const int, RigidBodyConstraint **const, const IKoptions &, MatrixBase< Map< VectorXd >> *, int *) |
| template void | approximateIK (RigidBodyTree *, const MatrixBase< VectorXd > &, const MatrixBase< VectorXd > &, const int, RigidBodyConstraint **const, const IKoptions &, MatrixBase< VectorXd > *, int *) |
| void approximateIK | ( | RigidBodyTree * | model, |
| const MatrixBase< DerivedA > & | q_seed, | ||
| const MatrixBase< DerivedB > & | q_nom, | ||
| const int | num_constraints, | ||
| RigidBodyConstraint **const | constraint_array, | ||
| const IKoptions & | ikoptions, | ||
| MatrixBase< DerivedC > * | q_sol, | ||
| int * | INFO | ||
| ) |
| template void approximateIK | ( | RigidBodyTree * | , |
| const MatrixBase< Map< VectorXd >> & | , | ||
| const MatrixBase< Map< VectorXd >> & | , | ||
| const int | , | ||
| RigidBodyConstraint ** | const, | ||
| const IKoptions & | , | ||
| MatrixBase< Map< VectorXd >> * | , | ||
| int * | |||
| ) |
| template void approximateIK | ( | RigidBodyTree * | , |
| const MatrixBase< VectorXd > & | , | ||
| const MatrixBase< VectorXd > & | , | ||
| const int | , | ||
| RigidBodyConstraint ** | const, | ||
| const IKoptions & | , | ||
| MatrixBase< VectorXd > * | , | ||
| int * | |||
| ) |
 1.8.11
1.8.11 
