|
Drake
|
|
Drake
|
#include "drake/systems/controllers/zmpUtil.h"#include <Eigen/Dense>#include <unsupported/Eigen/MatrixFunctions>#include "drake/common/drake_assert.h"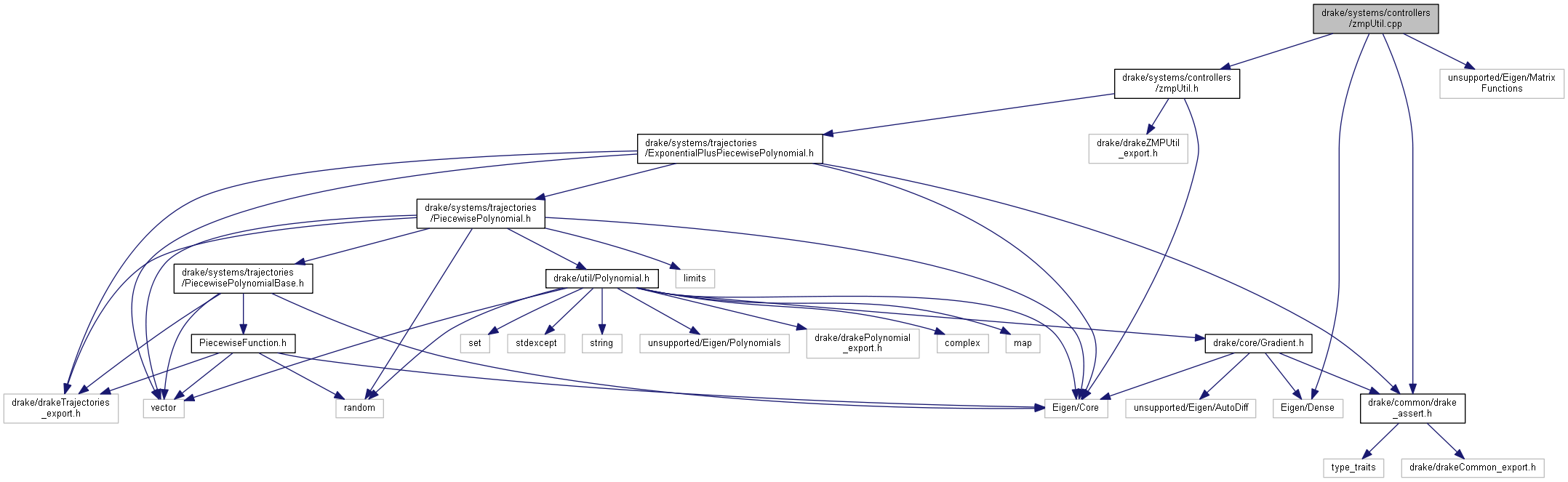
Functions | |
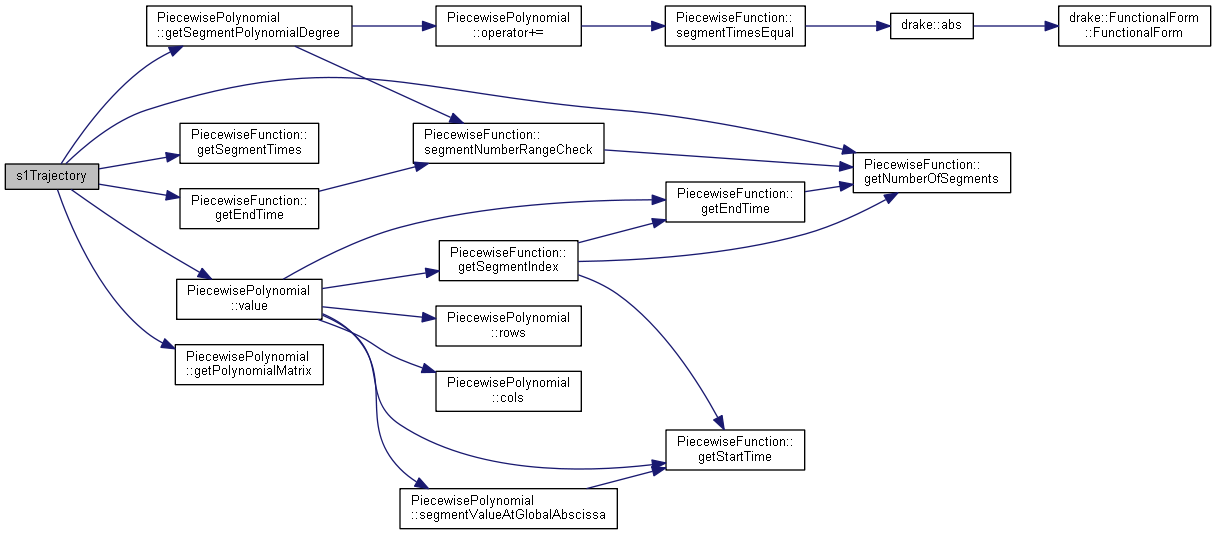
| ExponentialPlusPiecewisePolynomial< double > | s1Trajectory (const TVLQRData &sys, const PiecewisePolynomial< double > &zmp_trajectory, const Ref< const MatrixXd > &S) |
| ExponentialPlusPiecewisePolynomial<double> s1Trajectory | ( | const TVLQRData & | sys, |
| const PiecewisePolynomial< double > & | zmp_trajectory, | ||
| const Ref< const MatrixXd > & | S | ||
| ) |
 1.8.11
1.8.11 
