|
Drake
|
|
Drake
|
#include <mex.h>#include <cmath>#include <iostream>#include "drake/util/drakeMexUtil.h"#include "drake/systems/plants/RigidBodyTree.h"#include "rigidBodyTreeMexConversions.h"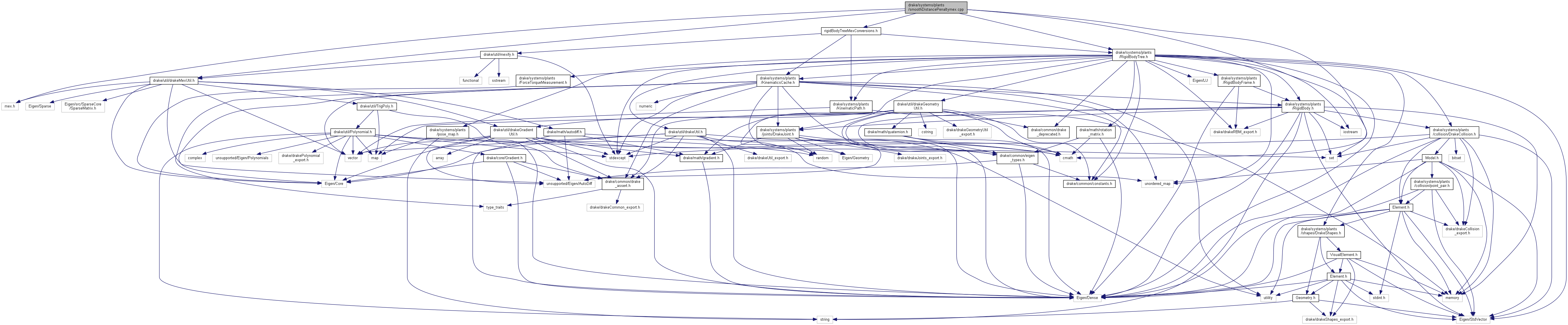
Functions | |
| vector< string > | get_strings (const mxArray *rhs) |
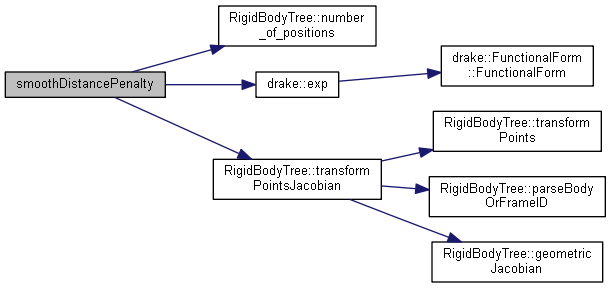
| void | smoothDistancePenalty (double &c, MatrixXd &dc, RigidBodyTree *robot, const KinematicsCache< double > &cache, const double min_distance, const VectorXd &dist, const MatrixXd &normal, const MatrixXd &xA, const MatrixXd &xB, const vector< int > &idxA, const vector< int > &idxB) |
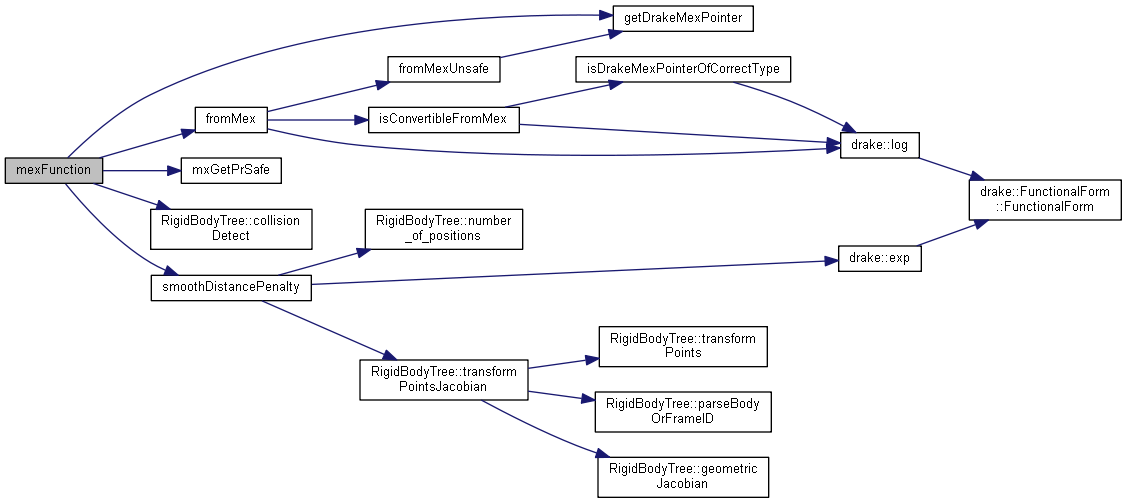
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| vector<string> get_strings | ( | const mxArray * | rhs | ) |
| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
| void smoothDistancePenalty | ( | double & | c, |
| MatrixXd & | dc, | ||
| RigidBodyTree * | robot, | ||
| const KinematicsCache< double > & | cache, | ||
| const double | min_distance, | ||
| const VectorXd & | dist, | ||
| const MatrixXd & | normal, | ||
| const MatrixXd & | xA, | ||
| const MatrixXd & | xB, | ||
| const vector< int > & | idxA, | ||
| const vector< int > & | idxB | ||
| ) |

 1.8.11
1.8.11 
